DEMO_vid: https://www.linkedin.com/posts/matthew-basilio-2b7470252_robotics-embeddedsystems-computervision-activity-7425359510296412161-9T7a?utm_source=share&utm_medium=member_desktop&rcm=ACoAAD5cSKsBTjZ4Hr_dAQlWt-yBRU8424m0gcE
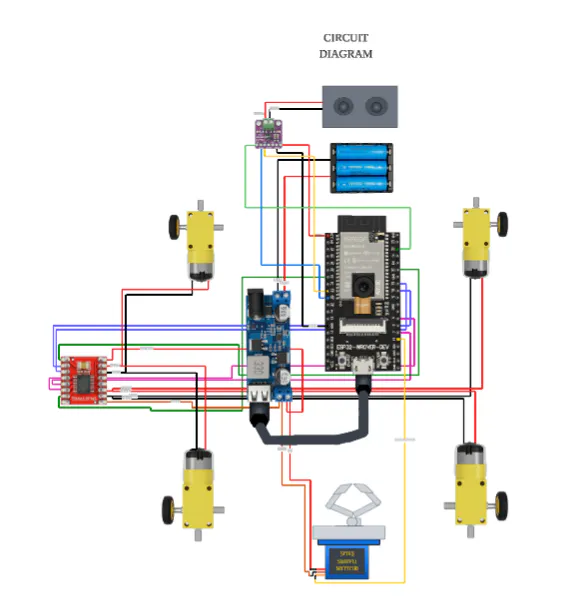
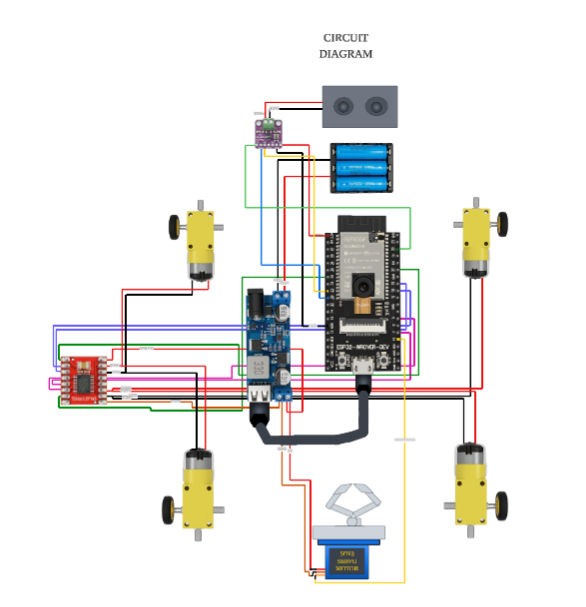
This project proposes the design and implementation of a tri-modal rover capable of operating in manual, gesture-controlled, and autonomous modes. Powered by the ESP32-WROVER-DEV and ESP 32 WROOM DEV microcontroller and equipped with an OV2640 camera module, the rover integrates computer vision, wireless communication, and lightweight machine learning.
The project is inspired by NASA studies of autonomous planetary rovers including rovers created by the Jet Propulsion Laboratory (JPL) and seeks to reproduce the similarity in principle of navigation and decision making with a smaller, low cost prototype. In addition to disaster response, this system will examine how the rover can be used to explore the planets in the future with the focus on the autonomous control. (Espressif Systems, 2023; NASA JPL, 2022).


















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments