#include <cstdlib>
#include <iostream>
#include <sstream>
#include <string>
#include <RF24/RF24.h>
#include <fstream>
#include <math.h>
#include <json/json.h>
using namespace std;
//Initialisation du module radio
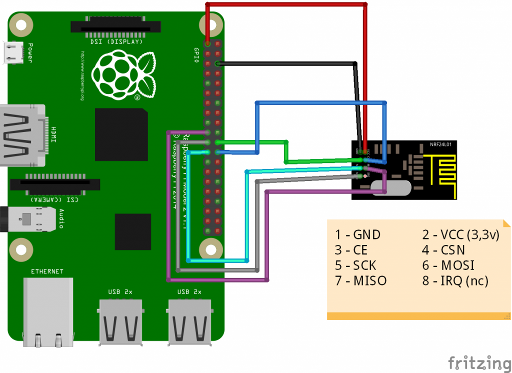
RF24 radio(RPI_V2_GPIO_P1_22, RPI_V2_GPIO_P1_24, BCM2835_SPI_SPEED_8MHZ);
const uint8_t pipes[][7] = {"master","slave","idle"};
struct payload_request_t
{
uint8_t number;
uint8_t destination;
char message[14];
};
struct payload_general_t
{
uint8_t number;
char message[15];
};
uint16_t timeout_ttl = 1000;
payload_request_t request;
payload_general_t answer;
//Cette fonction permet d arreter l execution du code et d afficher l etat de la transmission
void finish(bool sucess, int error, char * message)
{
char status[6];
if (sucess)
strcpy(status, "true");
else
strcpy(status, "false");
printf("{\"status\":\"%s\",\"code\":\"%d\",\"message\":\"%s\"}\n", status, error, message);
/*if (sucess)
exit(1);
else
exit(1);
*/
}
std::string azimut_std_old = ""; //Variable contenant l'azimut "ancienne" du satellite
std::string elevation_std_old = ""; //Variable contenant l'elevation "ancienne" du satellite
float azimutf_old = 0; //Variable permettant de stocker la valeur précedente de l'azimut
int compteur = 0;
int main(int argc, char** argv)
{
while(1){
srand(time(NULL));
/*
* Initialisation du module radio
*/
radio.begin();
radio.setAutoAck(1); // Activation de l'AutoAck
radio.setRetries(15,15);
radio.enableDynamicPayloads();
radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);
//Fonctions de tests
/*// Definition du parametre de destination, on l'attache a l'appel de la fonction pour des tests
json_object * key = json_object_object_get(jobj, "to");
if (key == 0)
finish(false, 3, (char *) "Missing destination");
request.destination = atoi( (char *) json_object_get_string(key) );
// Definition du parametre 'message', on l'attache a l'appel de la fonction pour realiser des tests de la fonction
key = json_object_object_get(jobj, "message");
if (key == 0) // 'message' nao existe
finish(false, 4, (char *) "Missing message content");
strncpy(request.message, (char *) json_object_get_string(key), 14);
*/
//Definition de la destination de la requete
request.destination = 1;
//Ouverture du fichier texte contenant les coordonnees du satellite
std::ifstream fichier("Coordonnees.txt");
if (fichier) //On test la bonne lecture du fichier
{
std::string azimut_std_new; //Variable contenant l'azimut du satellite
std::string elevation_std_new; //Variable contenant l'elevation du satellite
int commande_servo;
int commande_moteur;
int azimut;
int i;
char set[6];
char separateur[6];
//char commande[10];
strcpy(set,"set=");
strcpy(separateur,";");
for(i=0;i<=compteur;i++){
std::getline(fichier, elevation_std_new, ';'); //On recupere l'elevation du satellite
std::getline(fichier, azimut_std_new, '\n'); //On recupere l'azimut du satellite
}
compteur++;
//On regarde si les valeurs ont changé, puis si oui, on modifie les commandes
if ((elevation_std_old.compare(elevation_std_new)) || (azimut_std_old.compare(azimut_std_new))){
commande_servo = atoi(elevation_std_new.c_str());
azimut = atoi(azimut_std_new.c_str());
float azimutf = azimut;
commande_moteur = (((azimutf - azimutf_old) * 200.0f) / 360.0f) + 0.5f; //Calcul de la commande du moteur en fonction de l'azimut
char commande_moteur_std[10];
sprintf(commande_moteur_std, "%d", commande_moteur); //Conversion de la commande moteur de int en string
//Affichage des valeurs recuperees et calculees
printf("Commande servo : %d\n",commande_servo);
printf("Azimut : %d \n", azimut);
printf("Commande moteur : %d\n",commande_moteur);
//Creation du message
char message[16] = {""};
strcat(message,set);
strcat(message,elevation_std_new.c_str());
strcat(message,separateur);
strcat(message,commande_moteur_std);
printf("message : %s\n",message);
strcpy(request.message,message);
// On met à jour les valeurs
azimut_std_old = azimut_std_new;
elevation_std_old = elevation_std_new;
azimutf_old = azimutf;
printf("test\n");
request.number = (uint8_t) rand();
printf("nombre : %d \n",request.number);
radio.write(&request,sizeof(payload_request_t));
radio.startListening();
unsigned long started_waiting_at = millis();
bool timeout = false;
while ( !radio.available() && !timeout )
if (millis() - started_waiting_at > 10000)//timeout_ttl )
timeout = true;
// printf("test2\n");
if ( timeout )
finish(false, 5, (char *) "Timed-out");
radio.read( &answer, sizeof(payload_general_t));
if (answer.number != request.number)
finish(false, 6, (char *) "Wrong ACK");
radio.stopListening();
//Commande de test
// request.number = (uint8_t) rand();
// printf("message bis : %s",request.message);
// printf("nombre bis : %d",request.number);
// radio.write(&request,sizeof(payload_request_t));
// radio.printDetails();
finish(true, 0, answer.message);
}
}
}
}

_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




 Pascal Cotret
Pascal Cotret




{kind=link}
{kind=link}
Comments