


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 3 | |||
 |
| × | 2 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
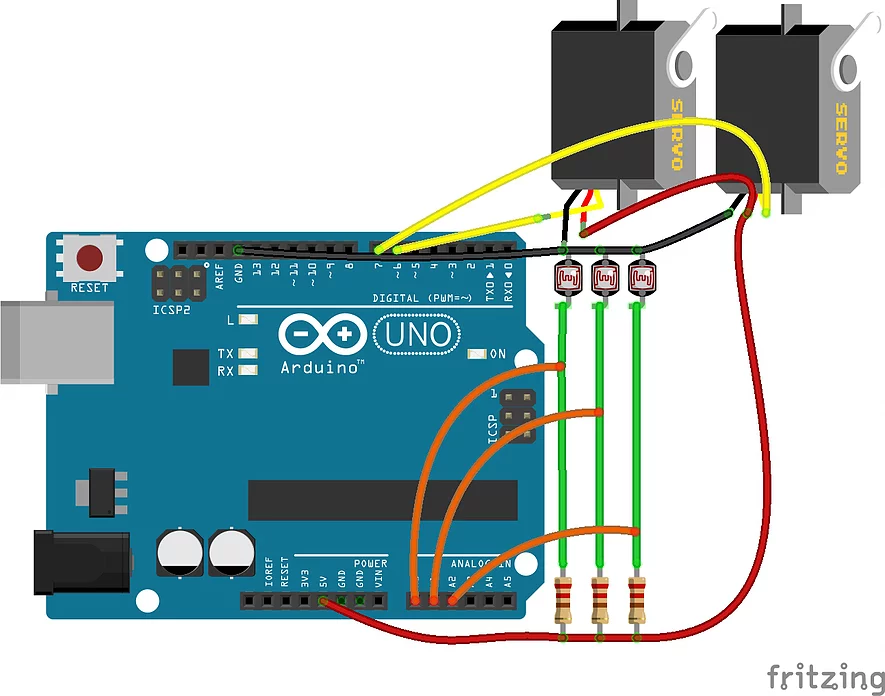
In order to create a solar parabola tracker, we wanted to create a mini solar tracker in the first place.
This device is working thanks to 3 photoresistor and 2 servo-motors.





{kind=link}
Comments