





Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Before read the story, plase take a look here:
https://www.youtube.com/watch?v=S8aXLacX14s
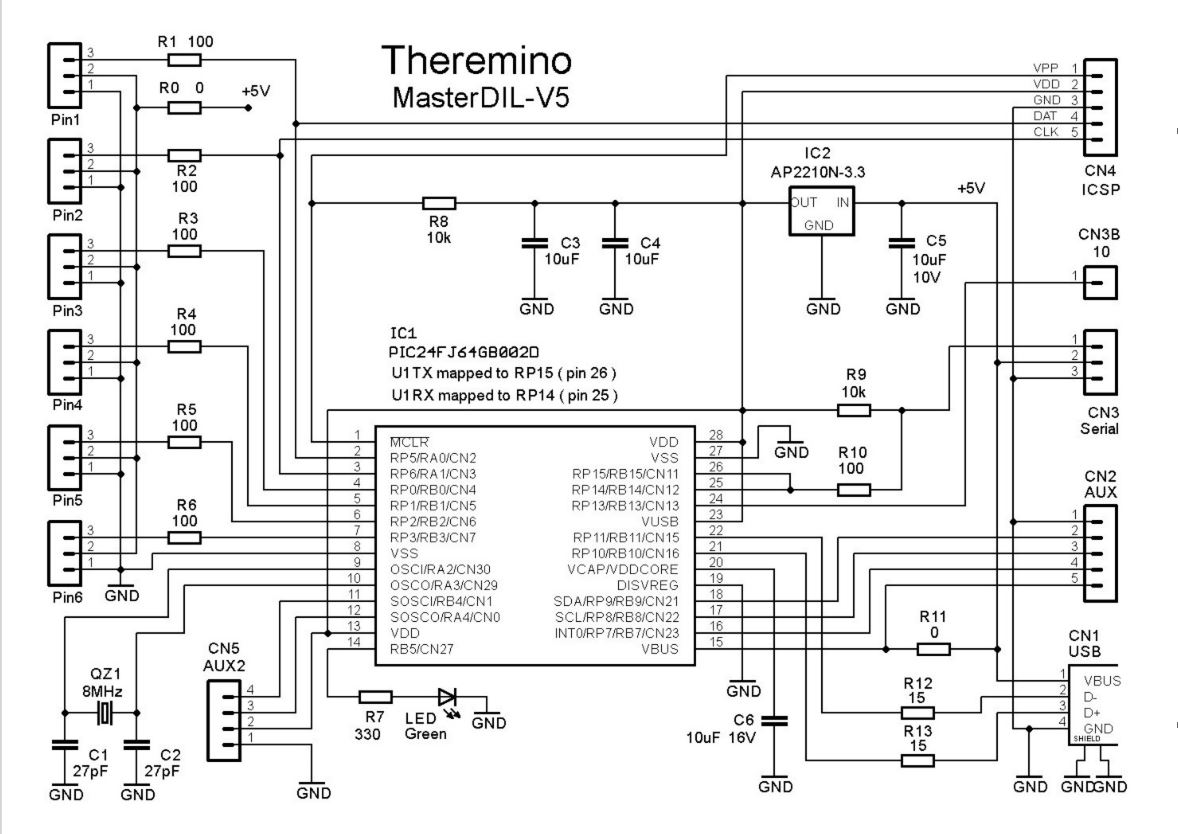
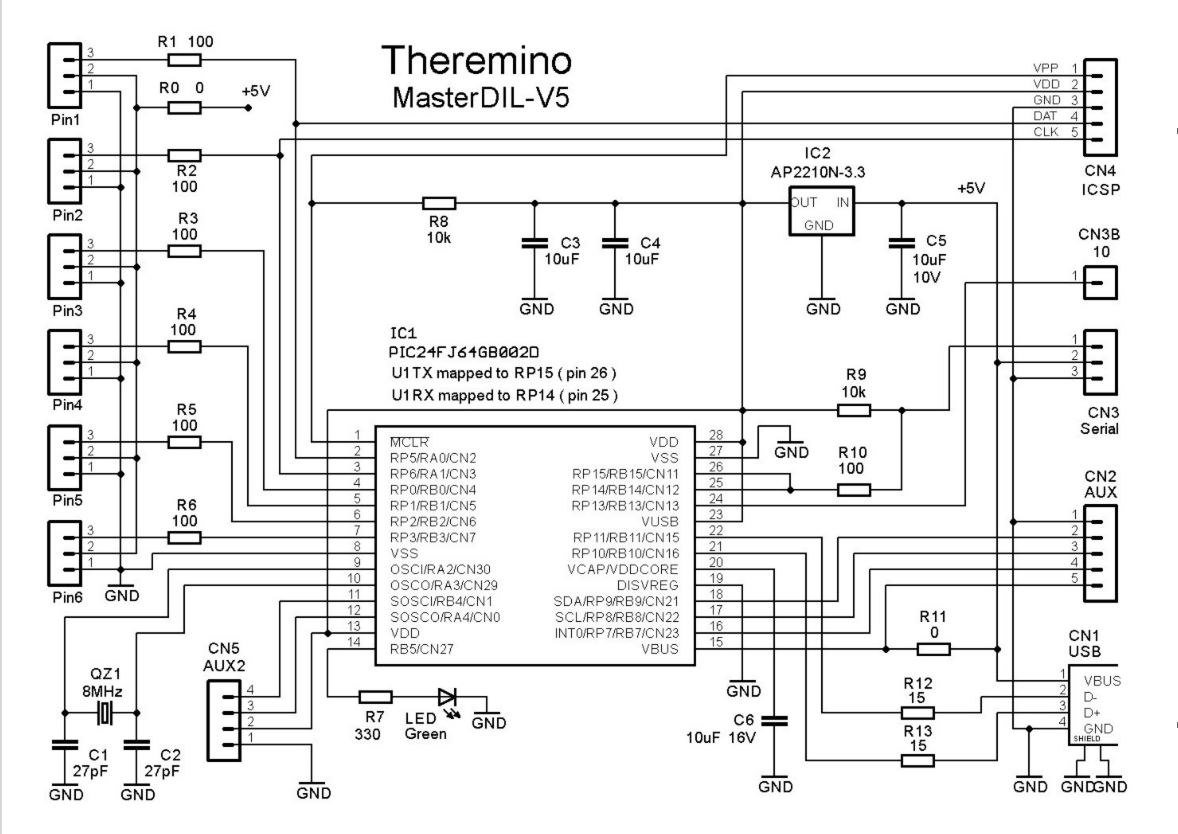
Theremino Arm
Questo è il programma di controllo per un braccio robotico. Attualmente sono implementati solo quattro snodi, ma tutto è pronto per espandere o modificare il programma, per ogni genere di applicazioni simili.
Chi vuole cimentarsi con la costruzione di bracci robotici, può usare questo programma come esempio, e come collezione di funzioni utili. Ma tenga presente che sta intraprendendo un progetto molto impegnativo, dove le cose da imparare e da capire sono molte. Ci vorrà molto tempo prima di costruire qualcosa che si muova in modo sensato.
Anche la taratura delle lunghezze e degli angoli è un compito difficile, che richiede di aver ben compreso quello che si sta facendo. Se le tarature non sono precise, la punta del braccio non si muove su piani ortogonali e paralleli al piano di base, i rettangoli diventano dei trapezi e le linee rette diventano delle curve.
Se avete bisogno di consigli scriveteci. Per facilitare i primi esperimenti potremo darvi informazioni sui particolari del piccolo braccio scrivente che abbiamo costruito per prova e che potete vedere in azione nella pagina Video and Images
Costruzione meccanica In questo file troverete i dettagli costruttivi per un piccolo braccio robotico (progetto presentato al concorso make4cash della rivista ELETTRONICA OPEN SOURCE) RobotArm (file PDF con dettagli meccanici ed elettrici).
Per migliorare la precisione si potrebbero provare i servo DS8231 visibili qui: www.theremino.com/hardware/actuators/motors Questi servo costano abbastanza (circa 70 euro), ma promettono prestazioni cinque volte migliori dei TGY930. Non li abbiamo provati per cui inviateci, per piacere, i risultati dei vostri eventuali esperimenti.
Il Link1, che collega il secondo motore con il terzo, può essere realizzato come in questa immagine. Eliminando le crociere in plastica si ottiene maggiore rigidità.
– – – – – – –
Uso dei parametri non spiegati nei file di istruzioni
- Rapid (mm/min) – Velocità massima per gli spostamenti rapidi in millimetri al minuto.
- Work (mm/min) – Velocità massima durante la lavorazione (con punta che tocca la superficie), in millimetri al minuto.
- Max error – Massimo errore (approssimativamente in millimetri). Diminuendo questo valore i movimenti rallentano. Oltre a un certo punto si ottengono solo rallentamenti e nessun miglioramento di precisione. Anzi si ottengono linee più dritte, con velocità abbastanza alte e “Max error” superiore a “1”.
- Override Z – Abilitando questo parametro i valori di Z (altezza) del GCode non vengono più usati. Al loro posto si usano le due altezze fisse: “Zup” e “Zdown”.
- Z trip level – Se il valore Z del Gcode supera questo valore si usa “Zup” altrimenti “Zdown”. Solitamente si tiene a zero, tranne che per GCode particolari.
- Z up – Livello alto, per gli spostamenti rapidi, con punta che non tocca la superficie. Si tiene a qualche millimetro dalla superficie, per essere sicuri di non toccarla per sbaglio. Se si aumenta questo valore la sicurezza aumenta, ma la lavorazione viene rallentata.
- Z down – Livello basso, per i movimenti di lavoro. Solitamente si tiene a zero.
- GCode automation slot – Altre applicazioni possono comandare il cambio di Gcode scrivendo numeri interi in questo slot. -1 = Stop e riavvolgi il GCode alla prima linea 0 = Pausa 1 = Carica e avvia il primo Gcode 2 = Carica e avvia il secondo Gcode 3 fino a “N” = Carica e avvia i Gcode seguenti. I GCode devono trovarsi nella cartella “Theremino_Arm\Media\AutomationFiles” e vengono usati in ordine alfabetico. Per stabilire il loro ordine si consiglia di chiamarli 01-Nome / 02-Nome / 03-Nome etc…
- Automatic parking position – Abilitando questa casella il braccio torna automaticamente alla posizione di parcheggio durante le pause.
{kind=link}



Comments