

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Our DIY Shopping Cart transforms your shopping time from a boring project to a fun-filled activity. Get ready to change its face once again this during the Black Friday shopping mania this year. Behold *drum roll* the RC Shopping Cart - a shopping cart that dances to the waves sent by a remote control transmitter, just like a remote control car, only that the car has been replaced by the cart.
Want to turn some heads while you shop?
Then why are you still here?! Begin right away!
Step 1: Things You'll Need:- Transmitter and Receiver
- Male to Female Jumper Cables
The components for the Shopping Cart and Mobile Robot are given on their respective pages.
Step 2: The TwistWe have listed a number of tutorials that can be controlled using Smartphone through the GamePad app.
They use Bluetooth Module to connect themselves to the Smartphone.
But, all those projects can even be controlled with the help of Remote Control. In this project, we are going to transform two projects, Smartphone Controlled Shopping Cart and Mobile Robot.
Step 3: The Heart and the Soul of the ProjectThe Remote Control that we are going to use comes in a pair of a Transmitter and a Reciever.
The model which we are using is the FLYSKY CT6B and the transmitter is the MOD2 type.
The receiver gets connected to evive. And transmitter is with which you control your cart or the robots. It is not a one-step process and also the sequence of the steps should be the same.
Step 4: BindingAll the below steps will be the same for both of the projects.
The first and foremost step is binding. As the name suggests, you must have guessed correctly.
The process of connecting the receiver to transmitter is binding.
The BAT pin on the receiver is used for the same. Short the GND and SIGNAL pin of BAT Channel using Jumper Channel. To power up the receiver connect VCC and GND of any other channel to +5V and GND of evive. Once you do so, the LED of the receiver starts blinking.
Next, take the transmitter and hold the BIND button and press START.Thus, the blinking light on the evive thus becomes stable.
YAY! One down.
Step 5: Channel IdentificationOnce you complete the binding disconnect receiver from evive.
This process is done so that we can know which key on the transmitter is used to control which channel of the receiver.
Connect a servo to any one channel of the receiver except BAT channel. Once you have connected the servo.
Switch ON the transmitter. Try moving the sticks and potentiometer to check which controls it.
Repeat the same process for all the channels.
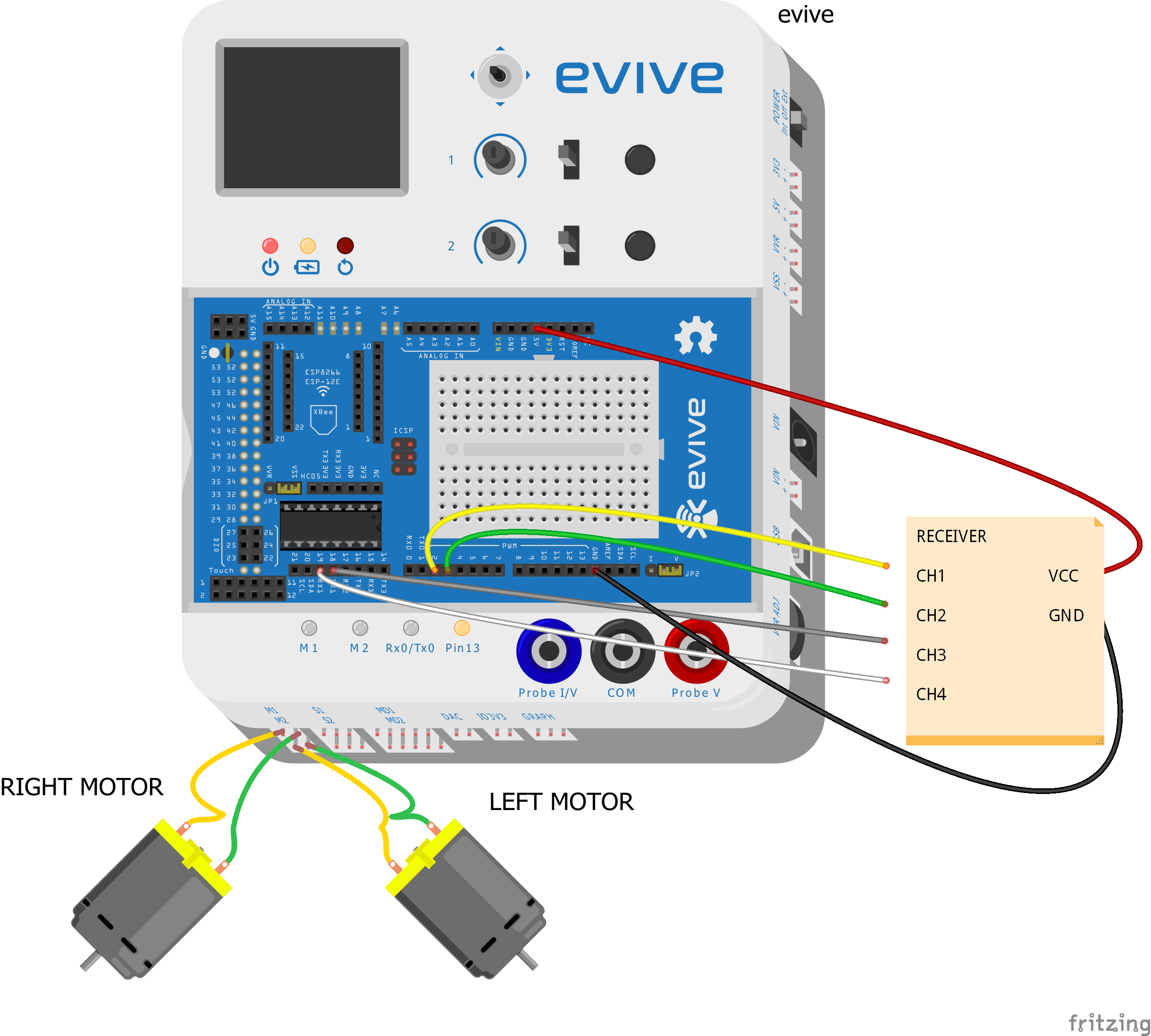
Step 6: The Final Step: ConnectionWe will be connecting the receiver with evive.
Connections of Channel 1, Channel 2, Channel 3, and Channel 4 with evive is given below: The GND and VCC of all of them will be connected to GND and +5V of evive.
Their Signal pins are connected as:
- Channel 1 - Digital Pin 2
- Channel 2 - Digital Pin 2
- Channel 3 - Digital Pin 18
- Channel 4 - Digital Pin 19
Check the below fritzing image for the connections:
As we know that the transmitter and the receiver pair work on PPM ( Pulse Position Modulation).
The DC Motors work on PWM ( Pulse Width Modulation).
The code below is used to convert PPM to PWM.
And then the motor runs on the given PWM.
Download the Arduino Code and evive Library from the code section below.
Step 8: ConclusionWith this, the RC Shopping Cart is ready to transform your Black Friday shopping experience for good! Enjoy!




{kind=link}
Comments