

Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Eyes on the prize, Violet. Eyes on the prize!
Get ready for a candy-grabbing face-off with your family and friends with this classic arcade game - the candy claw machine! But this time, it’s going to be a bit different - first, it’s going to be at your home, and second, you’re going to make it yourself! Oh yeah! Here’s bringing to you the evergreen Claw Machine with a touch of DIY! You can now easily make your own DIY candy claw machine and challenge your mates to a candy battle. Whoever gets the most candies wins the challenge. So, what are you waiting for? Jump right in before all the candies are gone!
Step 1: Things You'll Need:This was a brief overview of the candy claw machine. Now let us see what all components will you need to build one for yourself:
- evive
- Stepper Motor - 2
- Stepper Motor Driver A4988 - 2
- Jumper Cable
- Joystick - 2
- 16 x 2 LCD Display -1
- Breadboard - 1
- 12V 5A Power Supply Unit -1
- Coin Detection Machine -1
- Aluminum T Slot Rod- 20mm x 20mm - 9 meter
- T Slot 2020 Aluminum Profile L-Shape Interior Inside Corner Connector Joint Bracket - 24
- 4mm Allen Bolts of 8mm length - 100
- Acrylic Sheet Clear 3mm 1200mm x 900mm - 1
- Acrylic Sheet Clear 5mm 400mm x 300mm - 1
- BO Motor 6V - 1
- Micro Servo Motor - 1
- 8mm to 5mm Flexible Coupler - 2
- Lead Screw Rod 8mm - 2
- 8mm Rod - 4
- 8mm Inner Diameter Linear Bearing - 8
- 8mm End Shaft Support - 8
- Feviquick
- Nut and Bolts
The Claw Machine that we are about to make or most of the claw machines have very simple rules.
- As soon as we insert the coin in the machine, our time starts.
- It gives us some predetermined time like 2 or 3 minutes.
- And in that stipulated time, we try to grab as many candies with the help of gripper.
- We move the gripper and open and close the gripper using the joysticks. We have used a servo for gripper open and close mechanism and a motor, thread and a pulley to move the gripper up and down.
- For the XY movement of the gripper, we have used the lead screw mechanism which is driven by stepper motors. To move the gripper in XY direction, the user uses the other joystick similar to gamepad controllers. There are also limit switches for X and Y directions to prevent any damage.
- In order to decorate it more, we have added RGB lights, which also tells us about the time:
- Green for start
- Blue for 30 seconds over
- Red for 30 seconds remaining
- We have a small LED display screen that shows instructions as well as the time information.
It's time to build the frame.
We will be using Aluminium T Slot Extrusions to give it strength and stability. Cut 2020 Aluminium Extrusion of the following lengths:
After cutting them, let's assemble the base and top of the frame. For making them, we will be using two 360mm rod and two 400 mm rod. Assemble them as shown in the figure, using the T Slot 2020 Aluminum Profile L-Shape Bracket.
Now, we have 2 such frames for top and bottom.'
Next, mount the 560mm rods on the corner of the bottom frame as shown in the figure below using T Slot 2020 Aluminum Profile L-Shape Bracket.
Then, attach the top of the frame with the help of the brackets.
NOTE: Make sure that all the brackets are tightened properly so that the frame is stable.
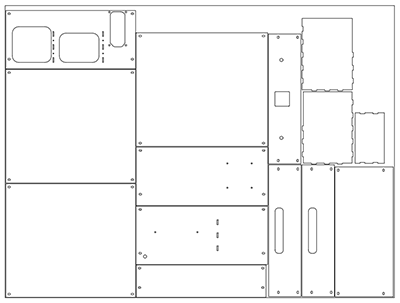
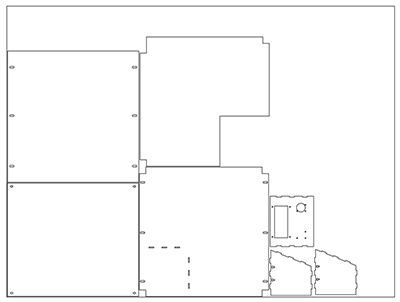
Step 4: Acrylic Parts Cut OutWe will use Clear Acrylic Sheet for making the Acrylic Parts for various applications in the Claw Machine. We will cut the sheet using laser cutting machines.
For 5mm parts, we will need a 400mm x 300mm sheet. You can download the files from here:
For 3mm parts, we will need 2 1200mm x 900mm sheet. You can download the files from here:
It's time to make the gripper platform:
First, assemble the pullies acrylic part to make a pulley as shown below:
Next, attach the pulleys to each shaft of the BO Motor.
Take the 2 bearing holders for the motor plate and glue both on the surface of the linear bearing as shown in the figure.
Mount the bearing assembly just made on the Gripper plate using glue.
On the opposite side mount the motor using the motor bracket.
Finally, mount the Lead Screw Nut on the Gripper plate using Nut Holder.
The final assembly will look like this:
Make for linear bearing holders and attach them to the X Channel Plate as shown in the figure.Also, mount the Y Channel Lead Screw Nut Holder on the same side.Mount the Stepper Holder for X Channel on the X Channel Plate.
Mount the Stepper Motor to the holder using M3 Bolts.
Mount the Flex Coupler on the shaft of the Motor.Mount the Lead Screw shaft to the Flex Coupler.
Mount the 8mm End Shaft Holder on the sides of the Stepper Motor.Place the shaft on the End Shaft Holders.Slide the Gripper platform as shown in the figure:
Also Mount the Lead Screw Holder.
The final assembly looks like this:
Mount the Stepper Motor in the Y Channel Stepper holder and mount it on one of the sides of the top frame. Also, mount the flexible coupler on the stepper motor shaft.
On the same Aluminium Extrusion mount the End Shaft Support on both sides of the Stepper Motor.
Mount the 8mm rods and the lead screw rod on the End Shaft Support and the flex coupler respectively. Make the end shaft support and stepper motor holder flexible on the Aluminium Extrusion.Slide the X Channel Assembly on the rods
Mount the End Shaft Supports on the other end of the shaft and the Lead Screw Holder.
The final assembly looks like this
Assemble the Gripper as shown in the figure below.
Attach thread on the top plate of the gripper and the other end to the pulley as shown in the figure.
Attach the Top Covers First: Front, Back, and Sides using Allen bolts and T slot nuts.
Attach the Base of the Claw Machine to the bottom of the frame
Attach the Front Mid and the Front Bottom Acrylic Parts to the front side of the frame.
Attach Controller Sides on the Front Bottom Acrylic Part using nut and bolts.
Attach the Controller Top and the Controller Front on the Controller Side Plate.
You can now attach the Joystick Modules and the 16×2 Display Module on the Controller Top Plate.
Mount the Left Middle SIde Plate and the Left Bottom Side Plate on the left side of the Claw Machine. Now attach the Barriers on the bottom Plate.
Mount the Right Middle SIde Plate and the Right Bottom Side Plate on the right side of the Claw Machine.
Mount the Candy Base Plate above the bottom plates.
Mount the Coin Counting Machine on Front Bottom Plate using Nut and Bolts that come with it.
For Y-Axis, the Limit Switches are mounted in the X Channel Plate and when X Channel Plate goes near the Frame, the limit switch is pressed and motion stops.
For X-Axis, the Limit Switches are mounted in on the Gripper Plate, and when Gripper Plate goes near the Shaft Support Holders, the limit switch is pressed and motion stops.
Step 11: The Finishing Touche!The RGB LED Strip is mounted on the inner parameter of the top frame using Glue or Double Sided Tape. The wire is extended to reach the Bottom of the Claw Machine.
We are using the following components that we have to connect with evive:
- Joystick
- 2RGB LED Strip
- Motor to Motor Channel 1 of evive
- Servo to Servo Channel 2 of evive
- 5 Limit Switches with Pull Down Configuration
- 2 Stepper Motor
- 2 Stepper Motor Drivers A4988
- 1 1602 LCD Display
- Coin Detecting Machine
- 12V 5A Power Supply
Here is the Fritzing Diagram of the Circuit:
Download the Arduino Code, evive Library, and Stepper Motor Library from the code section below.
To know more about Arduino, visit: https://thestempedia.com/tutorials/arduino-ide/
Step 13: ConclusionWith this, your DIY Candy Claw Machine is ready. Challenge your friends to a candy-grabbing duel: whoever gets the maximum number of candies wins!
To explore more projects, visit: https://thestempedia.com/project/





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments