
Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||

1 project • 0 followers
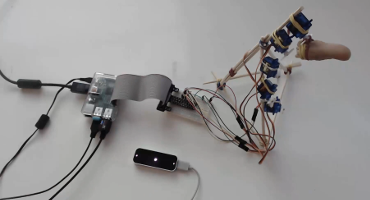
Tim is a hardware enthusiast making interesting technology projects with Leap Motion Controller, Myo, Sphero, Raspberry PI, Peeble, and OUYA.
Add the following snippet to your HTML:

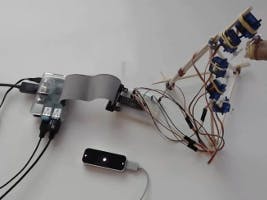
Leap Motion Controller Drives Raspberry PI 2 Servos.
Hardware components | ||||||
|
| × | 1 | |||
|
| × | 1 | |||
Software apps and online services | ||||||
| ||||||

{kind=link}
Comments