




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
 |
| |||||
"My Maid" is an Alexa controlled iRobot that utilizes Particle Photon and Particle cloud API to let you control where and when to clean your floor. The main objective is to make clean environment in the place where Children roaming in the house. We knew that Children are the simple example for making our home dirty and difficult them to handle. But Children have creativity so that we should try to encourage them instead of bring them into our control. As a human we can able to clean our floor more than 3 times but it goes on we can't. Here our Alexa gives strong voice command to control My Maid. My Maid is nothing but an Alexa controlled iRobot which perform repeated cleaning solution for garbage floor. The reason for using Robot in any application is to make repeatable action, so we deploy Alexa to listen command from the user and give the corresponding control command to iRobot for make repeatable cleaning action.
Setup iRobot createiRobot Create 2 is an smart, mobile robot platform that provides an enormous opportunity for designers, educators and researchers students to program behaviors, sounds, movements to perform skill operation. As a designer how we can use this in our application and what are all the things should be consider are discussed below,
iRobot has a port called MINI_DIN, which was helped us to hack it serially. Drill template on the face plate shows safe drilling areas. Removing the face plate and exposes the serial port. Kindly check the below link before drilling your iRobot (https://youtu.be/NBMiH6AmBaM?t=7 ). It has 7 pin, which are showed in the pin configuration below.
We given 5 V to the pin 1 (Vpwr) and pin 7 (GND) connected to ground. Send baud rate 115200 to the pin 5(BRC). The Alexa control command is transmitted through serial pins 3 and 4 (RXD, TXD) respectively.
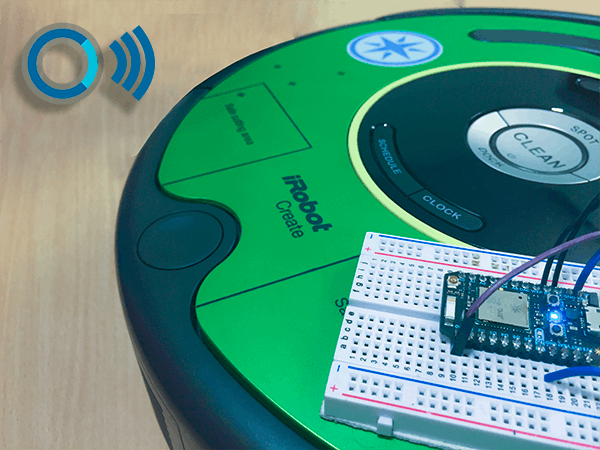
Particle's Internet of Things (IOT) hardware development kit help designer build a product. Particle combines a powerful ARM Cortex M3 micro-controller with a Broadcom Wi-Fi chip in a tiny thumbnail-sized module called the PØ (P-zero).
Particle adds a rock solid 3.3VDC SMPS power supply, RF and user interface components to the PØ on a small single-sided PCB called the Photon. We can design Particle in open source, so when you're ready to integrate the Photon into your product.
The Photon comes in two physical forms: with headers and without. Prototyping is easy with headers as the Photon plugs directly into standard breadboards and perfboards, and may also be mounted with 0.1" pitch female headers on a PCB. To minimize space required, the Photon form factor without headers has castellated edges. These make it possible to surface mount the Photon directly onto your PCB.
Here we used only 5 pins in photon like VIN, GND, TX, RX, D0, D7. We need pin 1 and pin 6 to give supply and ground. Pins 3 and 4 used to send command through serial using TX and RX and the pins D0,D7 is used to change the baud rate of the photon.
Lambda
Go to Amazon AWS https://aws.amazon.com create an AWS account.
Then go to product menu and click lambda.
Create blank lambda function and give next and select Alexa skill kit and click next.
It asks for function name so give function name then select node.js in selectbox
In the text editor add the lambda code give below and give next to create lambda function
Finally it will generate ARN (Amazon Resourse Name).
Alexa
Create an account in https://developer.amazon.com and get started with the console and select Alexa skill kit.
Then click Add skill button and create Alexa skill and give the skill informations and click next.
And give interaction model as given in code in that give intent and sample utterances as given in code.
Then in configuration select north america and the put the generated ARN value in the text box below
Test the Project








Comments