Radio controlled model car complete with servos and ESC.
Most diy kits would be sufficient.
×
1
Story
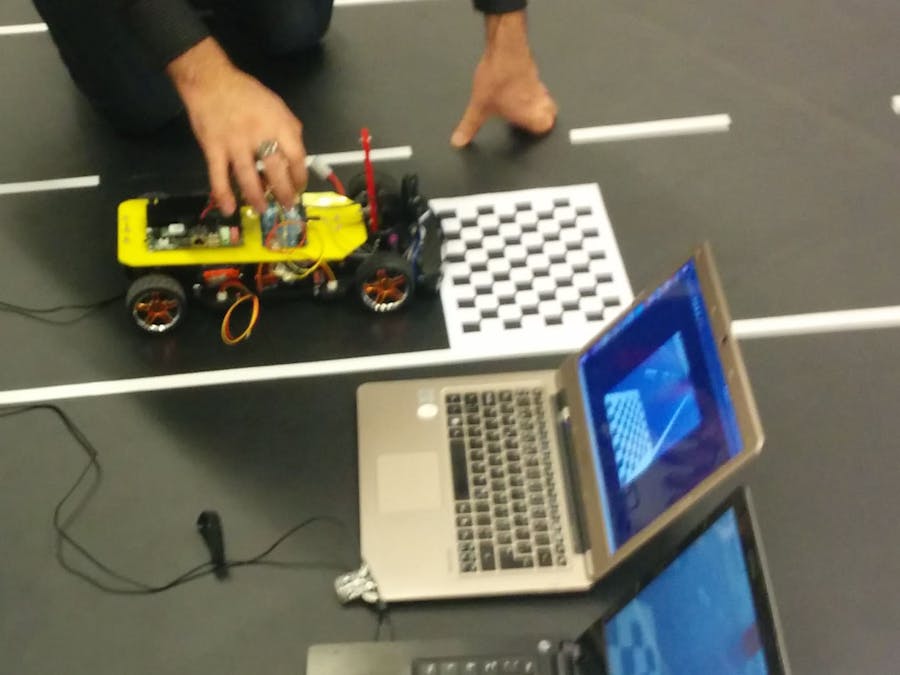
A self driving model car based on the Udoo board and an additional Arduino Uno. It uses a simple webcam to navigate the track and an array of ultrasonic and IR sensors for obstacle detection. It is all modeled and simulated in the Open Davinci framework. The architecture of the car is based on the MSV framework by Christian Berger: christianberger.net/opendavinci
Main image processing is done using Open CV: opencv.org
This project is now finished, and the documentation is a bit in retrospect.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

Comments