





Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 8 | |||
 |
| × | 16 | |||
 |
| × | 16 | |||
 |
| × | 8 | |||
 |
| × | 8 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Project Scope & Vision
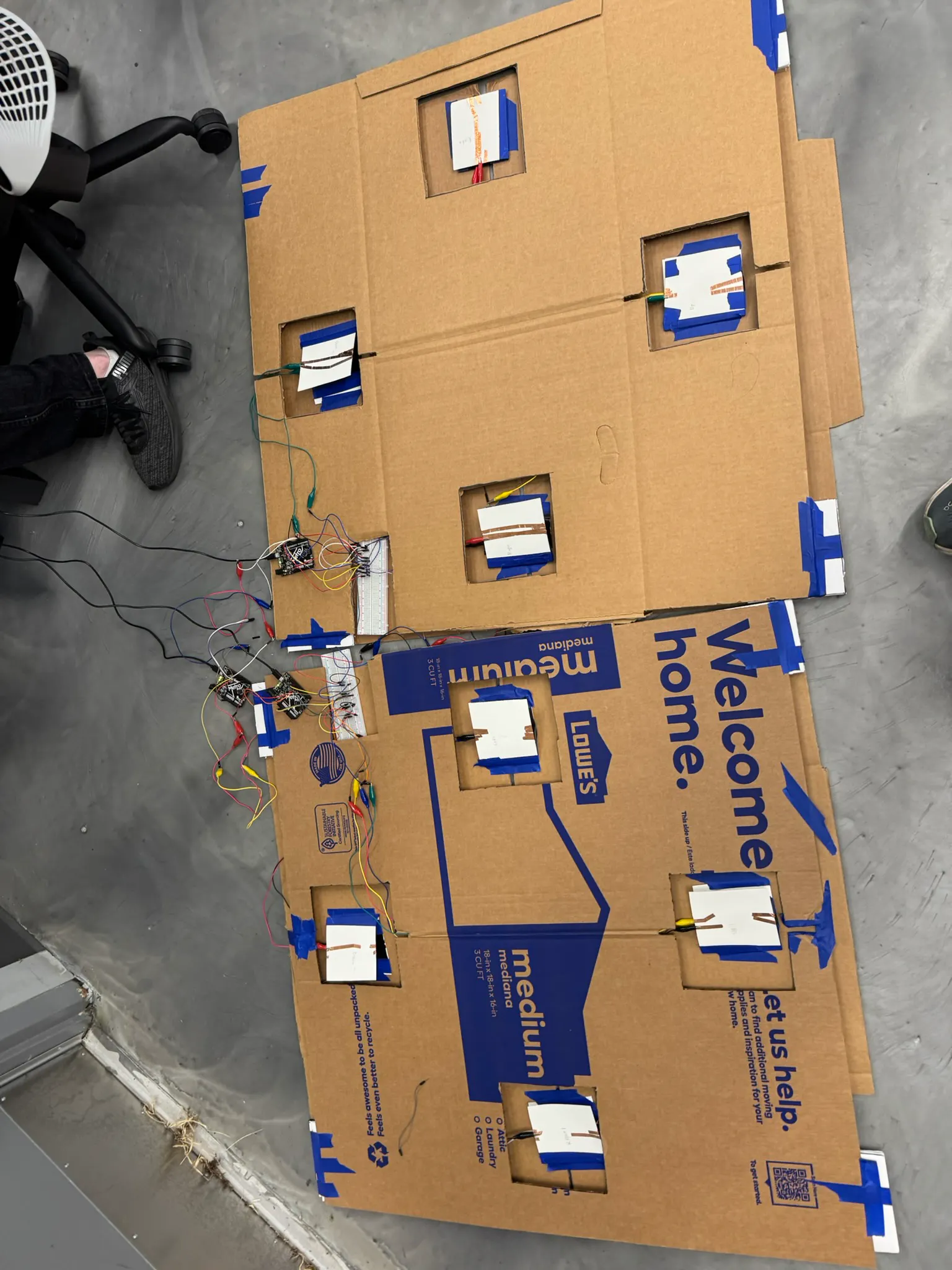
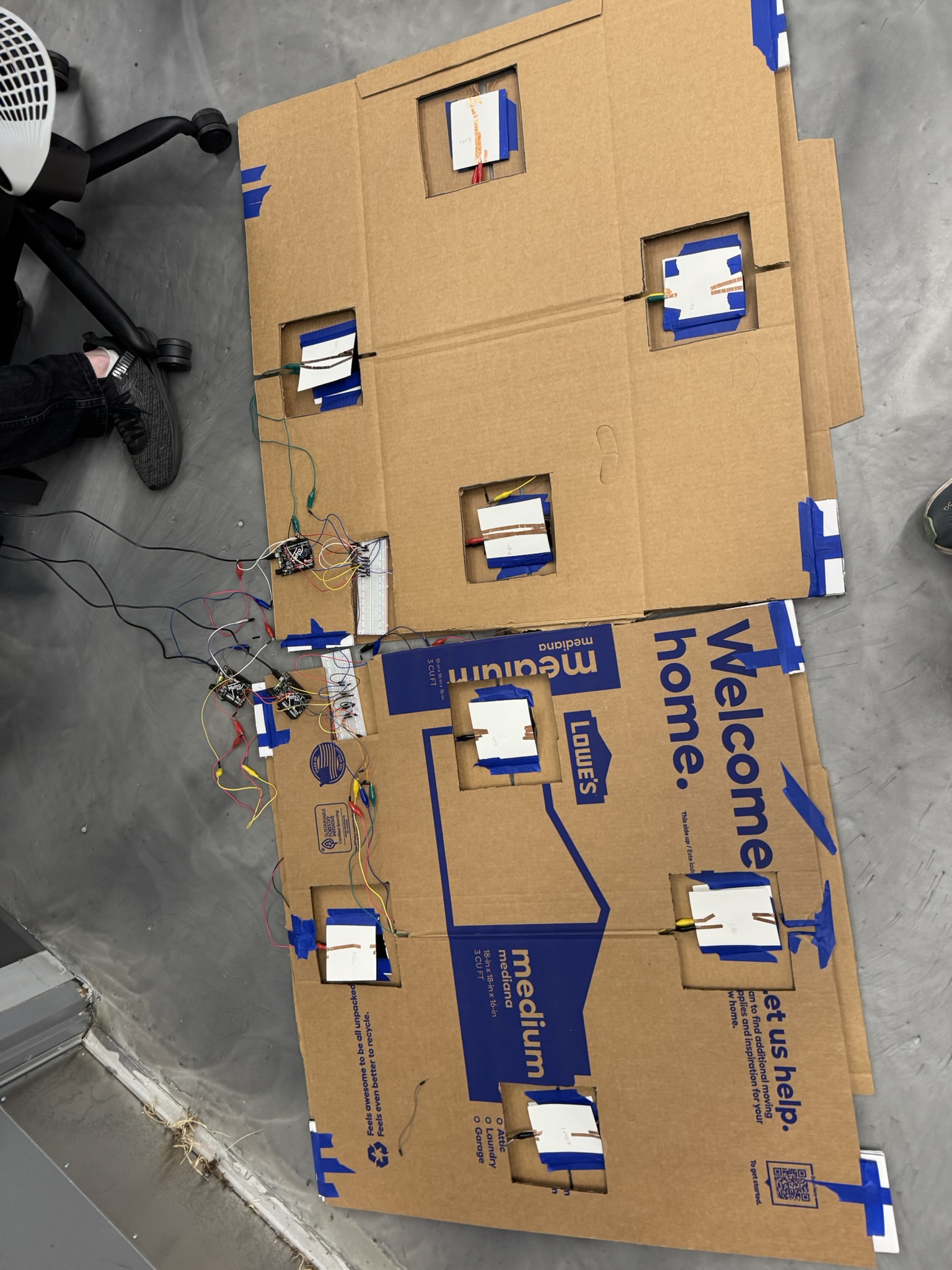
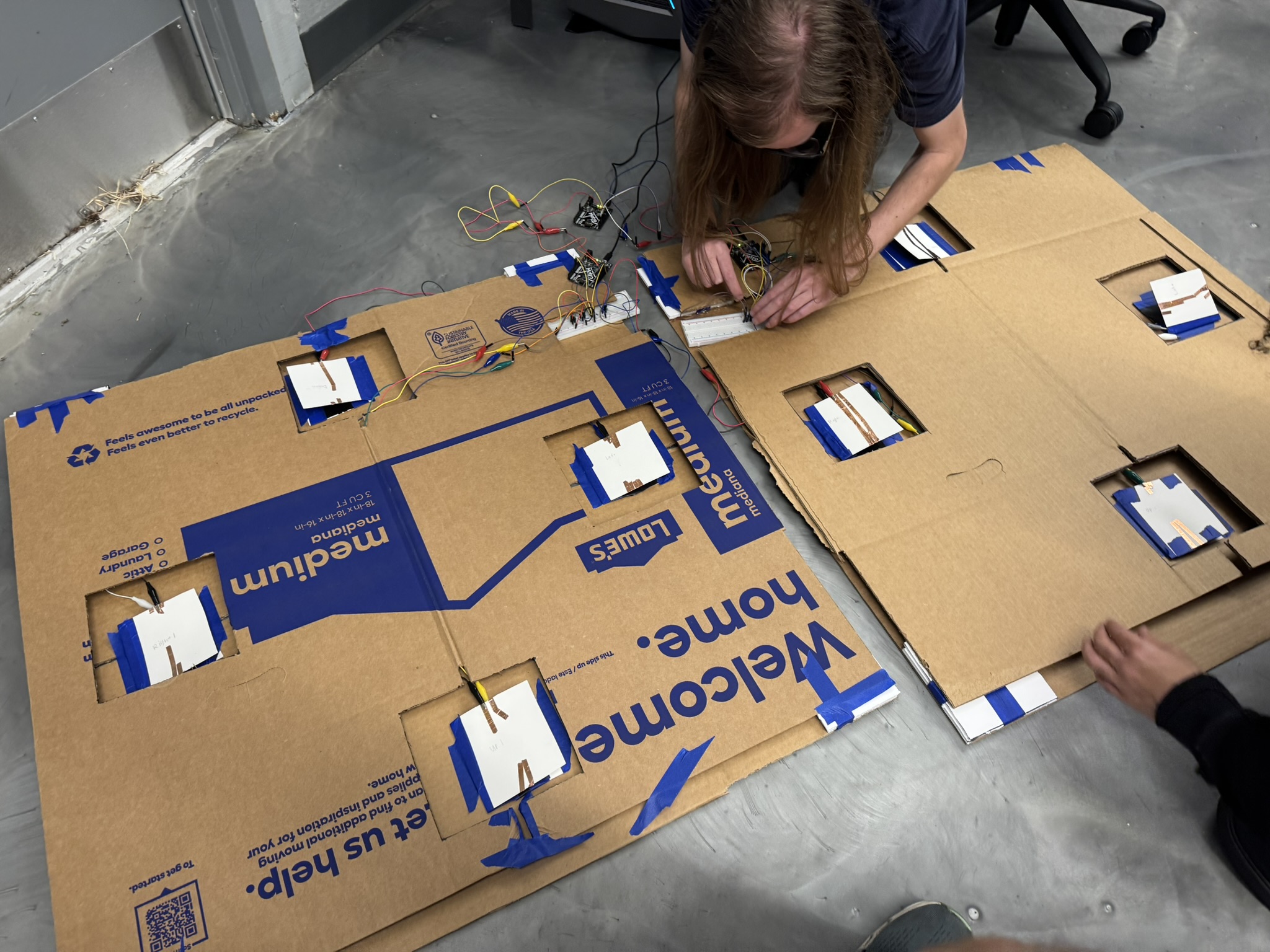
An unconventional physical interface that uses physical computing components to control a battle robot can take many forms. Still, the goal is to create a unique and effective way for the user to control the robot during battle. Our idea takes the form of a dance pad interface similar to Dance Dance Revolution that allows the user to direct the movement of the robot by stepping on different directional pads. The base of the interface is a set of four pads that can detect pressure through pressure sensors, and each pad is assigned to a specific movement for the robot. LEDs will be used to see if inputs are being received properly.
The input-output for our project is as follows:Pad 1: Bot Accelerates ForwardPad 2: Bot Turns RightPad 3: Bot ReversesPad 4: Bot Turns LeftFoot taken off pad: Bot StopPad 2 + 4: Bot Taunt
StoryHow does it work?
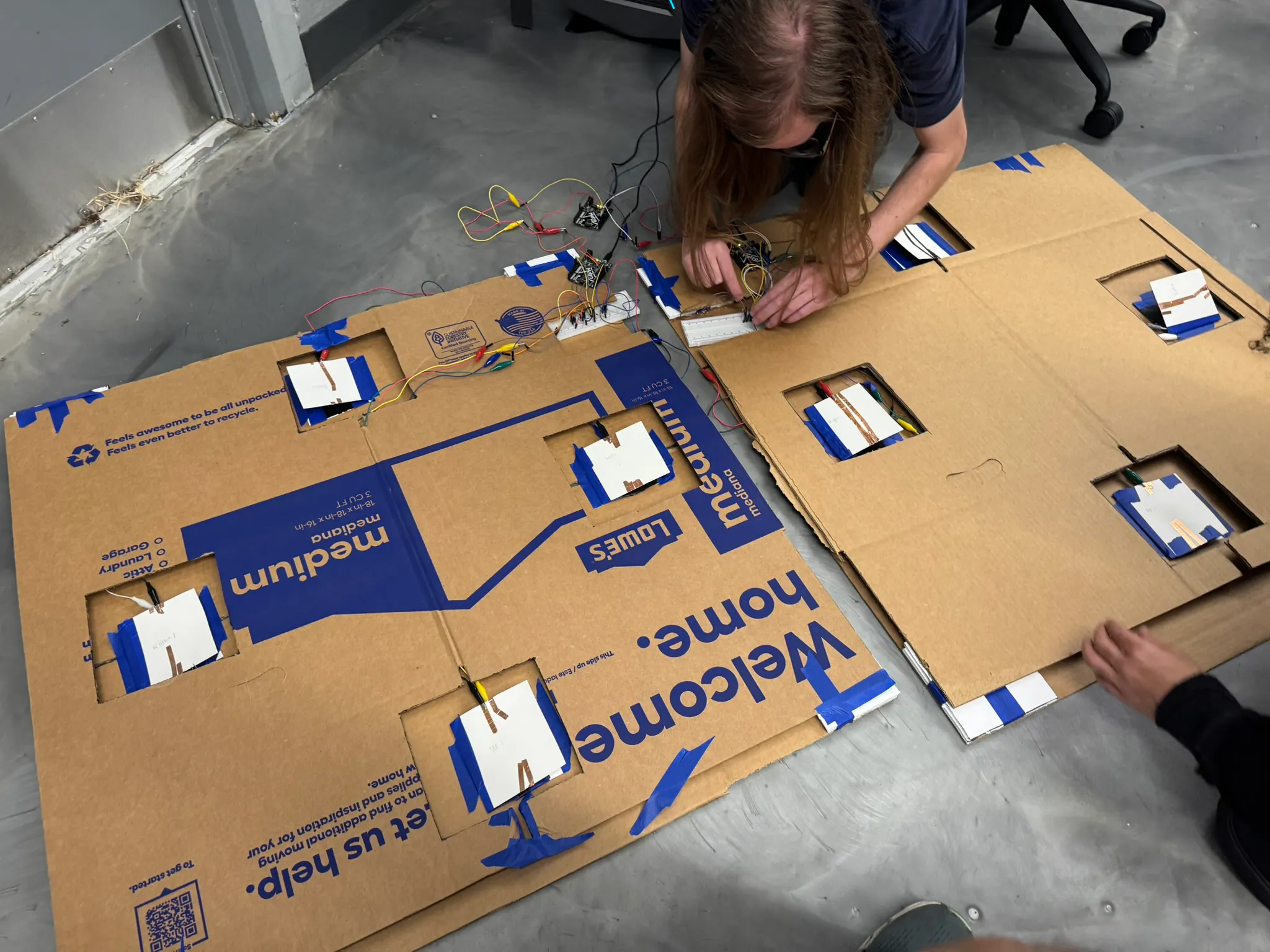
2 people have to have to stand on both pads, and align their inputs. It needs to inputs at the same time, such as someone pressing left will not do anything but both pads pressing left will.
What was the most challenging aspect?
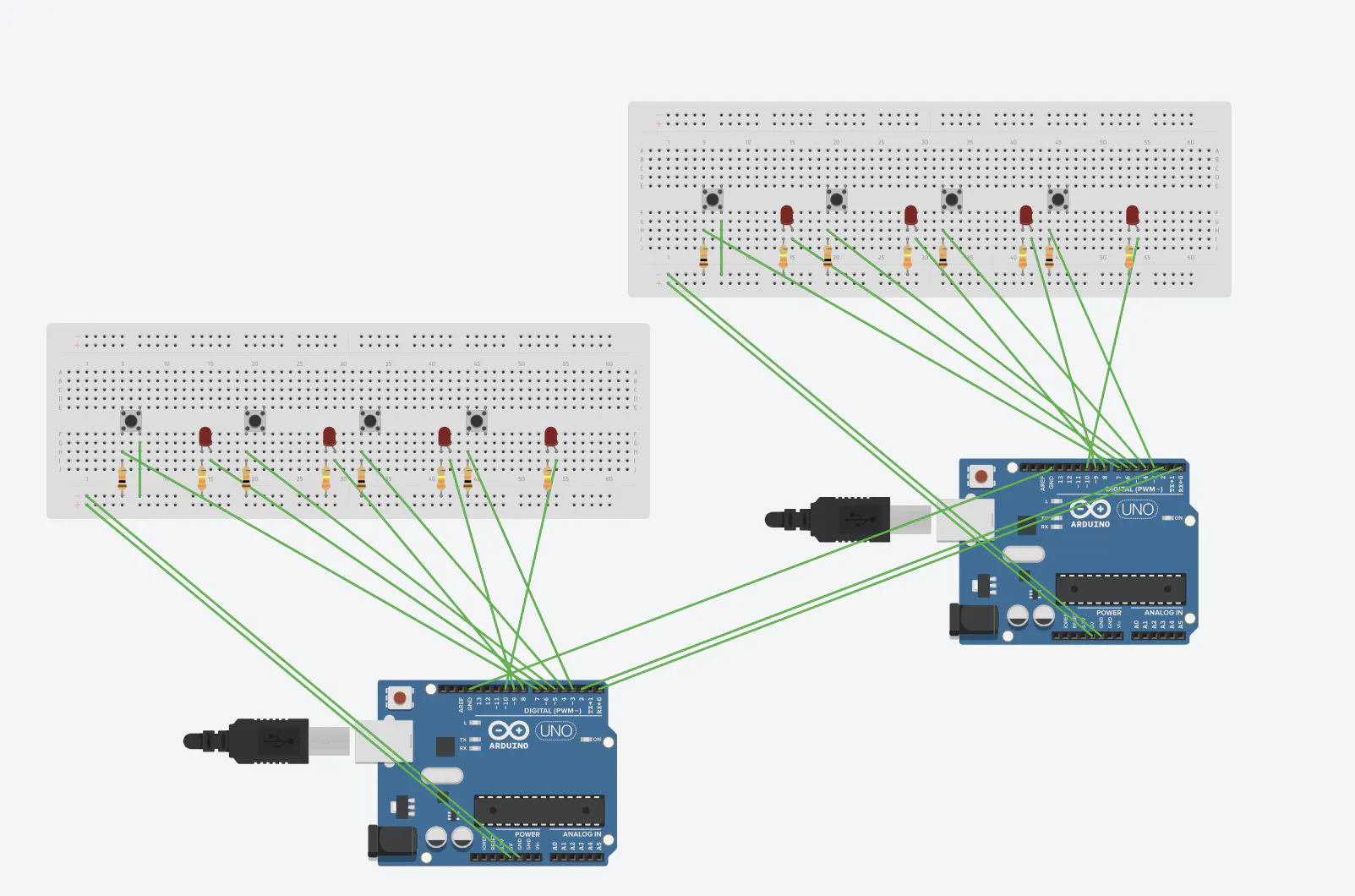
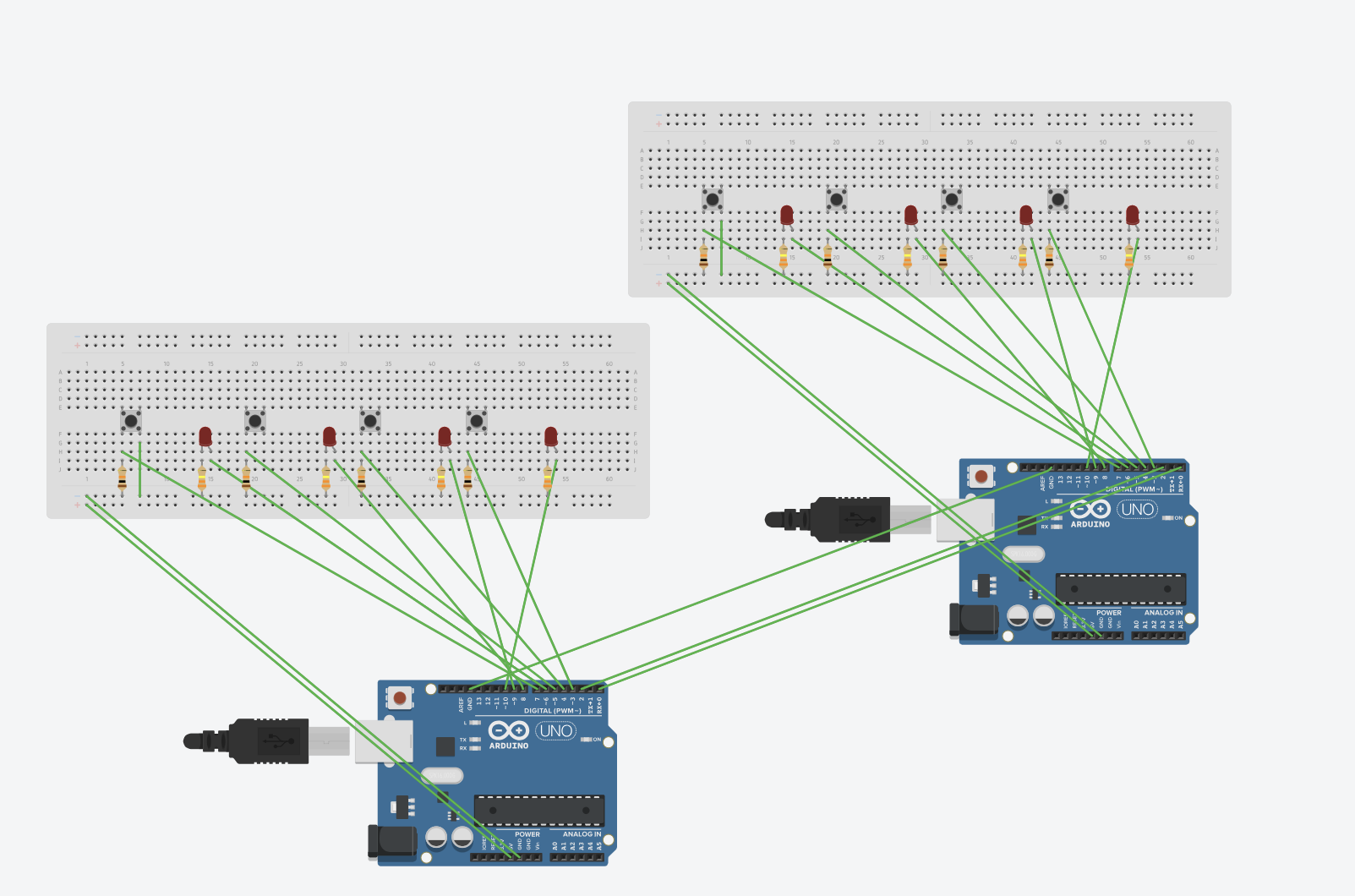
The most challenging aspect was setting up the arduinos together, as it takes 2 Unos to make it all work.
What were the team member's contributions?
Lucas Pereyra: Physical Prototyping, LogisticalElementsJon Soirilus: Physical Prototyping, LogisticalElementsAlexander Lynn: Electronic side, buildingelementsShawn Oosterbaan: Electronic side, buildingelementsJonathan Story: Code and logic handling Bryan Cunha: Code and logic handling
What are some notable successes/breakthroughs you had?
Finding a source of how to hook 2 arduinos together, as we had all worried about this but now that it was solved the process was much simpler.
How did the idea for this controller originate?
The idea of the controller originated from talking about the movie Pacific Rim, we all loved the movie and we decided to make a controller based on how they control the robots in that movie. Which is done by 2 synced up plates.
3 Pictures (minimum)
- 3 Pictures (minimum)
- 2 Videos of it functioning, including it controlling the Zumo. You are encouraged to use a video from the final Zumo battle.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments