During the week of Midterms, Team Family was struggling to stay focused on studying while idling around on the internet and being distracted by social media. We knew about the Pomodoro technique of studying that forces the user to study for 25 minutes, and then take a 5 minute break. While we could easily use this technique with a timer from our phones, Team Family wanted to make a more extravagant timer to enhance our studying sessions, and reduce our dependency on our addictive mobile devices (smartphones).
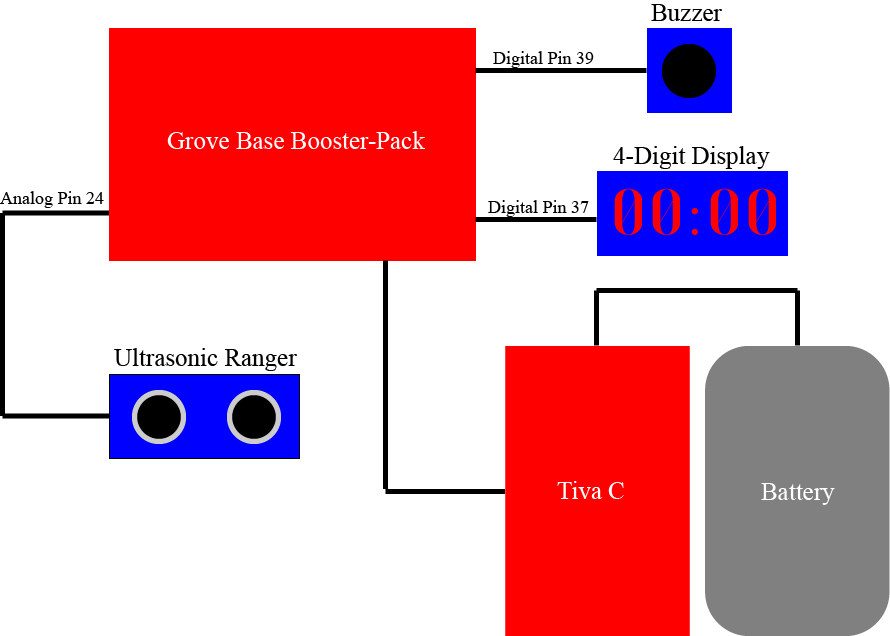
Next, what components did we use and why? First and foremost, we needed a 25-minute and 5-minute timer, so we made the program automatically count down from 25 minutes and then from 5 minutes. We wanted our project to alert the user whenever their timer finished, so we used the buzzer component to buzz 3 times after the 25- or 5-minutes run out. Also, in order to display how much time is left, we used the LCD 4 digit display. Then, we wanted to keep the user accountable: during the 25-minute study period, they need to be working the entire time. So, if the user gets up and the Ultrasonic Ranger component detects that something has moved from inside to outside its 2-feet radius, then the 25-minute timer pauses. The program doesn’t resume until the user comes back, which the program detects when there’s a movement of from outside to inside the 2-feet radius.
Alright, so how about the build instructions? We wanted to make our device operate independently for the clout. For more clout, we made a box for our device. It needed to house our boards, circuits, peripherals, and battery. The battery was the largest component (we just used the power bank Audrey has for her cell phone) so we made the box 7”x4”x5.5” to comfortably hold everything. The box parts were cut using an
The faces were joined together using hot gun. / We left one face open.
EPILOG Fusion M2 40 because Audrey has laser printer access at the OEDK and very much enjoys using it. The faces were joined using a hot glue gun. Since the device operates immediately upon being connected to power, and because Audrey wanted to easily retrieve her battery pack without using a hammer/mallet, we decided to leave one face of the box open.
Two holes sized to the 4-digit display and ultrasonic ranger, and holes at the top to filter the sound of the buzzer.
Additionally, the front face of our box has two holes sized to the 4-digit display and ultrasonic ranger to hold these peripherals in the correct place and orientation. Jiin absolutely hated the sound of the buzzer, so we placed the buzzer inside the box and cut a section of small holes in the front face to allow some, but not all, of the buzzer sound to travel. Finally, the front face was laser engraved with the project title, team name, and team members’ names. Bam, box.
Last, how do you use it? First, plug in the Tomato Timer to a power source. The way we built it, the power sources comes included, and you just have to connect the USB charger to the portable phone charger inside the box. Once you connect to a power source, the timer will start automatically, so you should start working. After 25 minutes, the buzzer will buzz. Then, a 5 minute timer will start, and you can take a 5 minute break during that time. After the 5 minutes run out, a buzzer will buzz, and the 25 minute work timer will begin again. When you’re done working, simply unplug the Tomato Timer. To see a preview of how to use it, download the video we provided under the "Schematics" section!






_ozA4avRXhQ.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)














{kind=link}
Comments