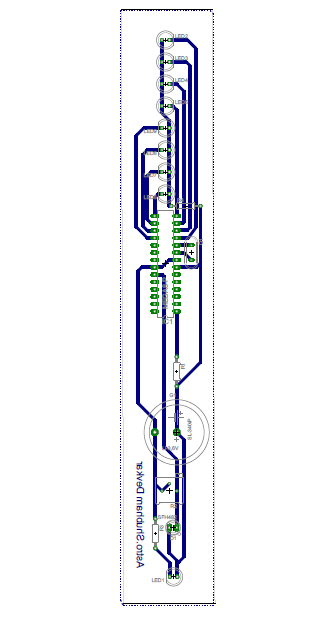
//made by shubham devkar
int l1=5;
int l2=6;
int l3=7;
int l4=8;
int l5=9;
int l6=10;
int l7=11;
int l8=12;
void setup()
{
Serial.begin(9600);
pinMode(l1, OUTPUT);
pinMode(l2, OUTPUT);
pinMode(l3, OUTPUT);
pinMode(l4, OUTPUT);
pinMode(l5, OUTPUT);
pinMode(l6, OUTPUT);
pinMode(l7, OUTPUT);
pinMode(l8, OUTPUT);
}
void loop()
{
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
if (sensorValue < 100)
{
digitalWrite(l1, LOW); //TO PRINT "w"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
digitalWrite(l6, HIGH);
digitalWrite(l7, LOW);
digitalWrite(l5, LOW);
delay(2);
digitalWrite(l1, HIGH);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, LOW);
digitalWrite(l8, HIGH);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, LOW); //TO PRINT "E"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, LOW);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, LOW); //TO PRINT "L"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, HIGH); //TO PRINT "-"
digitalWrite(l2, HIGH);
digitalWrite(l3, LOW);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(2);
digitalWrite(l1, HIGH);
digitalWrite(l2, HIGH);
digitalWrite(l3, LOW);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(2);
digitalWrite(l1, HIGH);//SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(2);
digitalWrite(l1, LOW); //TO PRINT "C"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, LOW); //TO PRINT "O"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, LOW); //TO PRINT "M"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH);
digitalWrite(l2, LOW);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
digitalWrite(l1, LOW); //TO PRINT "E"
digitalWrite(l2, LOW);
digitalWrite(l3, LOW);
digitalWrite(l4, LOW);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, LOW);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, LOW);
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, LOW);
delay(2);
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l8, HIGH);
delay(3);
}
else
{
digitalWrite(l1, HIGH); // SPACE
digitalWrite(l2, HIGH);
digitalWrite(l3, HIGH);
digitalWrite(l4, HIGH);
digitalWrite(l5, HIGH);
digitalWrite(l6, HIGH);
digitalWrite(l7, HIGH);
digitalWrite(l8, HIGH);
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














{kind=link}
{kind=link}
Comments