



Hardware components | ||||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Overview
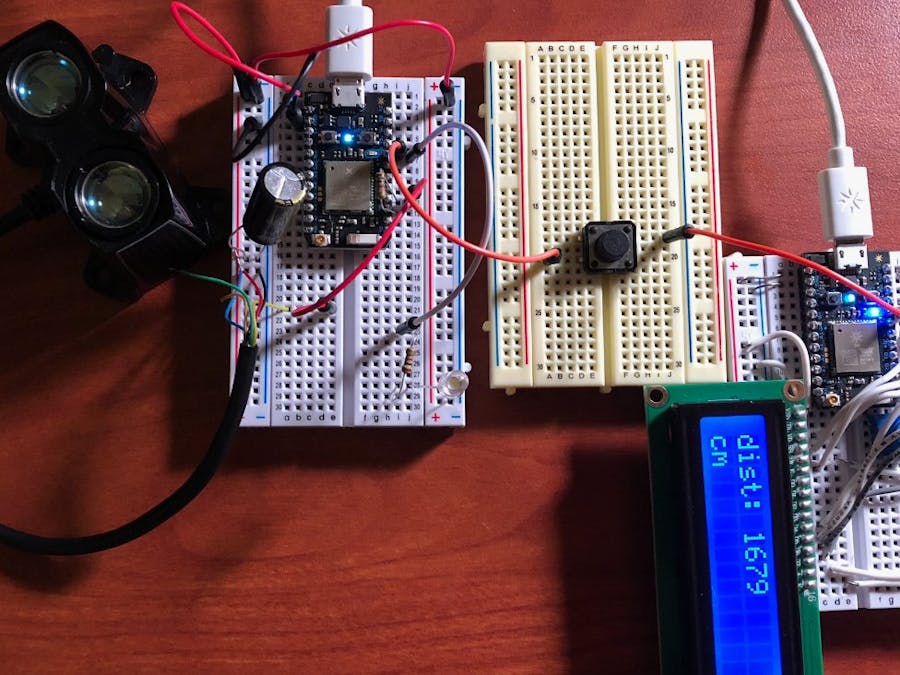
For this project a LIDAR-Lite V3 HD distance sensor was used with a pair of Particle Photons in order to send a wireless range value to a LCD screen. The wireless range signal eliminates the need for the range finder to be directly connected to a micro-controller/computer. All results were displayed on a LCD which is connected to a Photon that is also connected to the internet. For example, the range finder could be on one side of the room, a button is pushed, and the range is displayed on a LCD screen on the other side of the room.
Project Intent
Our original intent was to attach the LIDAR-Lite V3HP range finder to a compound bow in order to find the ranges of targets. Knowing an accurate range for bow hunting is critical because of the aiming height adjustments the hunter needs to make in order to hit the targets. The further away from the target, the higher you have to aim because of the Earths gravitational pull on the moving arrow. Knowing the exact distance to a target will allow for the hunter to make the accurate adjustment to hit their target.
Interface used
The LIDAR-Lite V3 range finder was wired to use the PWM (pulse width modification) interface/configuration. This PWM voltage signal is sent constantly, so the range finder is constantly reading values. The range value is not displayed on the LCD until a button on the LCD circuit is pushed.
Data Display
All value reading are displayed on Atomiot.com (click for our data) in real time. The range is scheduled to be displayed every five minutes. This would allow someone who cant see the LCD to also obtain the range values. Unfortunately, the schedule is only limited to set times such as 1 minute, 5 minutes, and so on due to Particles publishing quotas. This means that real time data can not be obtained instantly or constantly. If constant data is needed, the user would have to constantly press the LCD button, or view a serial monitor on a wired computer. Once the Photon is connected/published properly on the Particle Console page, there will be a variable button located next to the events list. If the variable "get" button is pushed, the range finder value will be displayed. This is just another way to view what the range value is.
Error involved
It should be noted that the range finder gets conflicting data when reading close up measurements (within 2 meters of the range finder). When reading close measurements, the display reads values such as 4000 cm or even 50 cm. From common sense, we know such a close up measurement should not read these values. This results in large amounts of error and gives poor data. These measurement values came as a shock to our group because the Garmin LIDAR-Lite V3HD Operation Manuel and Technical Specifications documentation says that measurements less than two meters should have an error of only +/- 5%. When measuring ranges over two meter, we received errors of 2% to 10%. This may be due to the way the sensor is designed to work with a constant zeroing process. The transmission and reception of the laser signal may have zeroing issues or conflicting signals. The range finder is limited to 40m, and gives a blank reading for any values over this limit.
What Each Particle Does
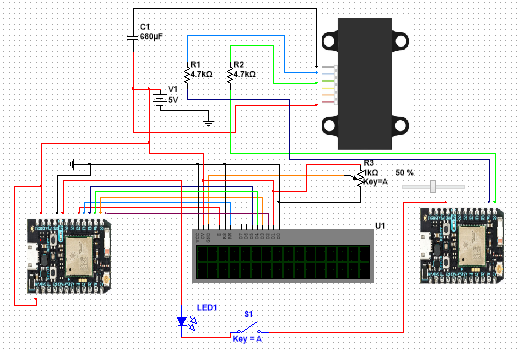
The project described above requires two different circuit boards. Each circuit board will have a photon attached in order to perform a specified task. One photon will send the range value to the Cloud when prompted by a button on another photon circuit. The other photon will receive the range from the Cloud while commanding the other photon to send it data. In order to ease confusion, the particle tasks are described below:
Particle one: LIDAR-Lite range finder (sends range when prompted).
Particle two: LCD screen and button.
Setup of the Particle/LCD Circuit is credited to Core Electronics. This is a video link to a tutorial setup the circuit.
Conclusion
This is a good project for short range finding (less than 40 meters) and for possible hunting trips. Our original intent was to attach the LIDAR-Lite V3HP range finder to a compound bow in order to find the ranges of targets. The range finder is not effective for distances within 2 meters or over 40 meters. Connecting the two photons to the Cloud requires a good internet connection, so the user will have to make accommodations for this. The LIDAR-Lite V3HD sensor works extremely well and displays fairly accurate data.



{kind=link}
Comments