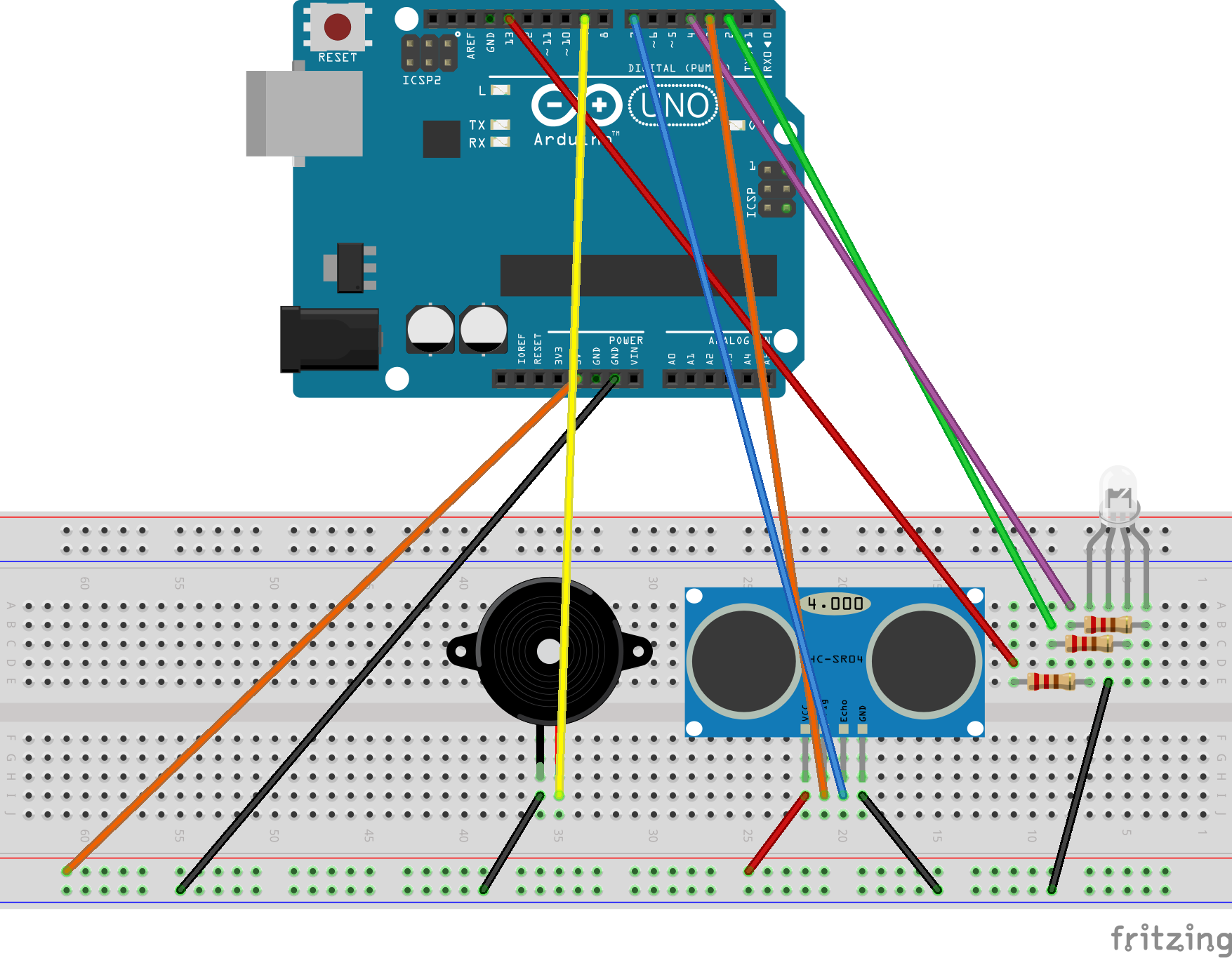
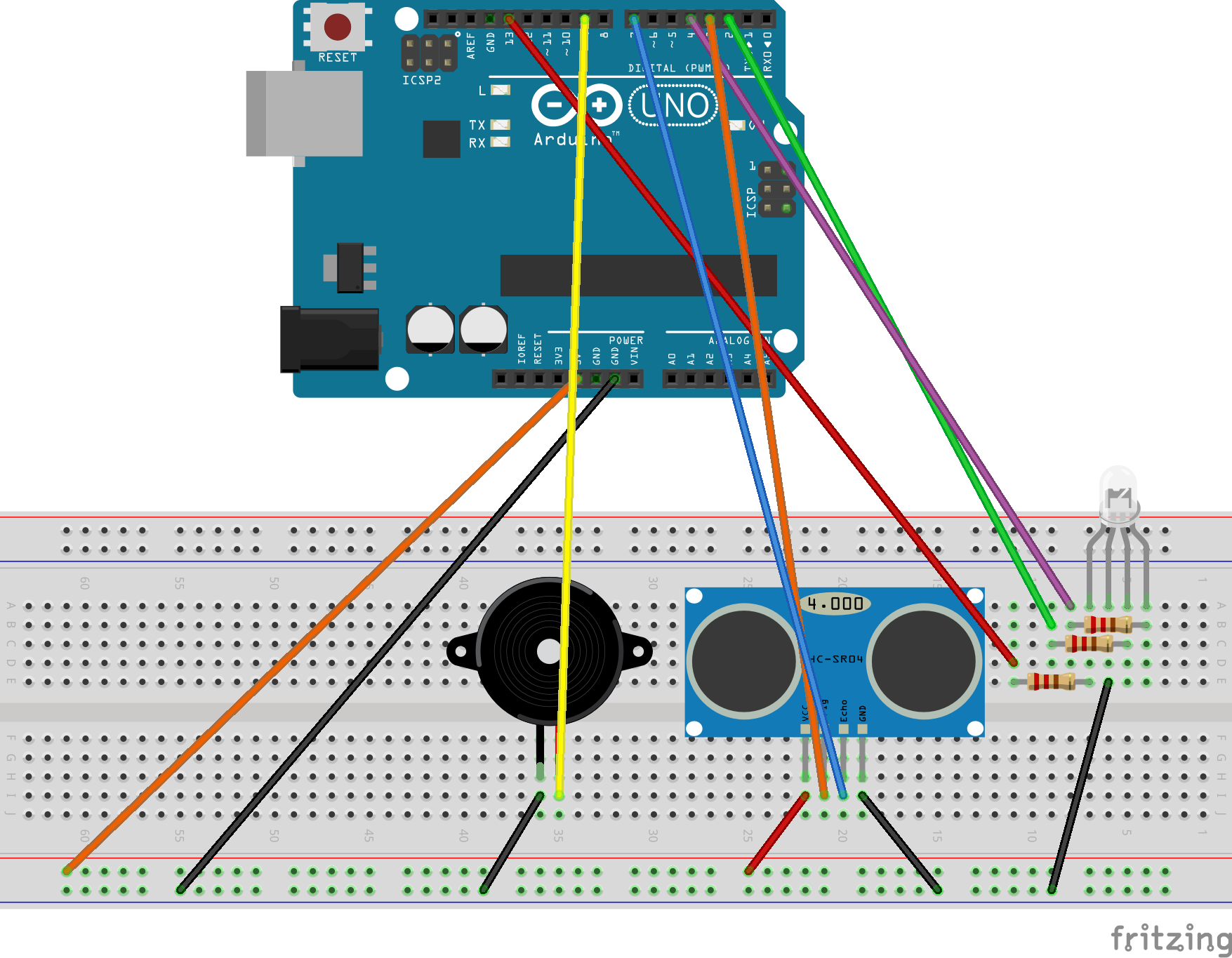
int trigPin=3;
int echoPin=7;
int buzzPin=9;
int redPin=13;
int greenPin=2;
int bluePin=4;
int duration, cm;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzPin, OUTPUT);
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration=pulseIn(echoPin, HIGH);
cm=(duration/2)/29.1;
Serial.print("distance in centimeters: ");
Serial.println(cm);
if(cm>30 || cm<0){
digitalWrite(bluePin, LOW);
digitalWrite(redPin, LOW);
digitalWrite(greenPin, HIGH);
delay(500);
}
if(cm>=20 && cm<=30){
digitalWrite(redPin, LOW);
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, HIGH);
delay(500);
}
if(cm<20 && cm>0){
digitalWrite(greenPin, LOW);
digitalWrite(bluePin, LOW);
digitalWrite(redPin, HIGH);
tone(buzzPin, 2000, 500);
delay(1000);
noTone(buzzPin);
}
}








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments