Have you ever thought of robots that are involved in sports and recreation activities? Robots that could mimic the act of athletes like runners and, gymnasts. Such robots are extremely interesting for robotics enthusiasts, makers, and inventors. One of the sports and recreation activities that attract boys and girls, young and adults are ziplining.
Ziplines are designed to transfer cargo or a person from the top to the bottom of the inclined cable. The cargo or the person is propelled by gravity and moves on the cable through a freely rotating pulley. The zipline robot that we are going to make looks like a monkey that moves on a cable by using its two arms. Making such a creature that uses its arms for locomotion on a cable is a challenging task. However, in this tutorial, we are going to make a fun and easy-to-build zipline robot with Lego Technic components, an Arduino board, and some off-the-shelf electromechanical components (Fig. A). The instructions are prepared in a way that you can build them at home.
Fig. A – General view of the zipline robot
As shown in Fig. A zipline robot hangs itself from a cable and uses its two arms for locomotion across the cable. In its simplest setup, the zipline robot is made of Lego Technic components, an off-the-shelf DC gear motor, 3D printed parts, and an ON/OFF toggle switch (Fig. B).
Fig. B – Combination of body structure and gear motor
For more sophisticated applications, an Arduino NANO board is added to the zipline robot to significantly increase the expandability and programming elements of the project (Fig. C). As you know, various adds-on shields can be added to any Arduino board to expand the project’s capabilities.
Fig. C - An Arduino Nano board
For instance, in the current project, a microphone from Adafruit is added to the zipline robot that enables a user to control the motions of the robot by clapping (Fig. D). This feature adds a lot of interactivity to the zipline robot. For example, you can control the speed of the robot by clapping, so that, the faster you clap, the faster it goes. Very fascinating.
Fig. D - Zipline robot with Arduino board and microphone
In this tutorial, we will make the zipline robot’s body structure out of Lego Technic pieces and then drive the arm’s mechanical mechanism using an off-the-shelf DC gear motor that is attached to the body structure through a 3D-printed housing. The gear motor’s torque is transferred through a pair of bevel and worm gears to both arm mechanisms.
Materials
Fig. E – Electronic and electromechanical components
Let's start assembling the zipline body-structure. It is a structure that holds a crank-rocker 4-bar linkage mechanism that creates the required arm’s motions for ziplining (Fig. G). The motor’s torque is transferred to the arm mechanisms through a pair of bevel gears and a worm drive. Prepare the Lego Technic pieces according to Fig. F, and follow the step-by-step video tutorial below.
Fig. G - 4-bar linkage mechanisms of zipliner arm
Mechanical Parts Assembly Tutorial
3D printed parts
Lego Technic components only match with LEGO gear motors. In order to transmit power from the shafts of the off-the-shelf gear motors to Lego gears or axles, we need to print a housing for the gear motor as well as a coupling (Fig. H). The housing serves as an interface or an adaptor between the gear motor and the Lego Technic beams. The coupling connects the gear motor shaft with the Lego Technic axle. These 3D printed parts are called Lego compatible housing and shafts (Fig. I). Please download the 3D files and print the motor housing, Lego-compatible coupling with your 3D printer, or use the ones in a maker space nearby.
Fig. H - 3D printed Lego Technic compatible motor housing
Fig. I - General view of LEGO technic compatible gear motor
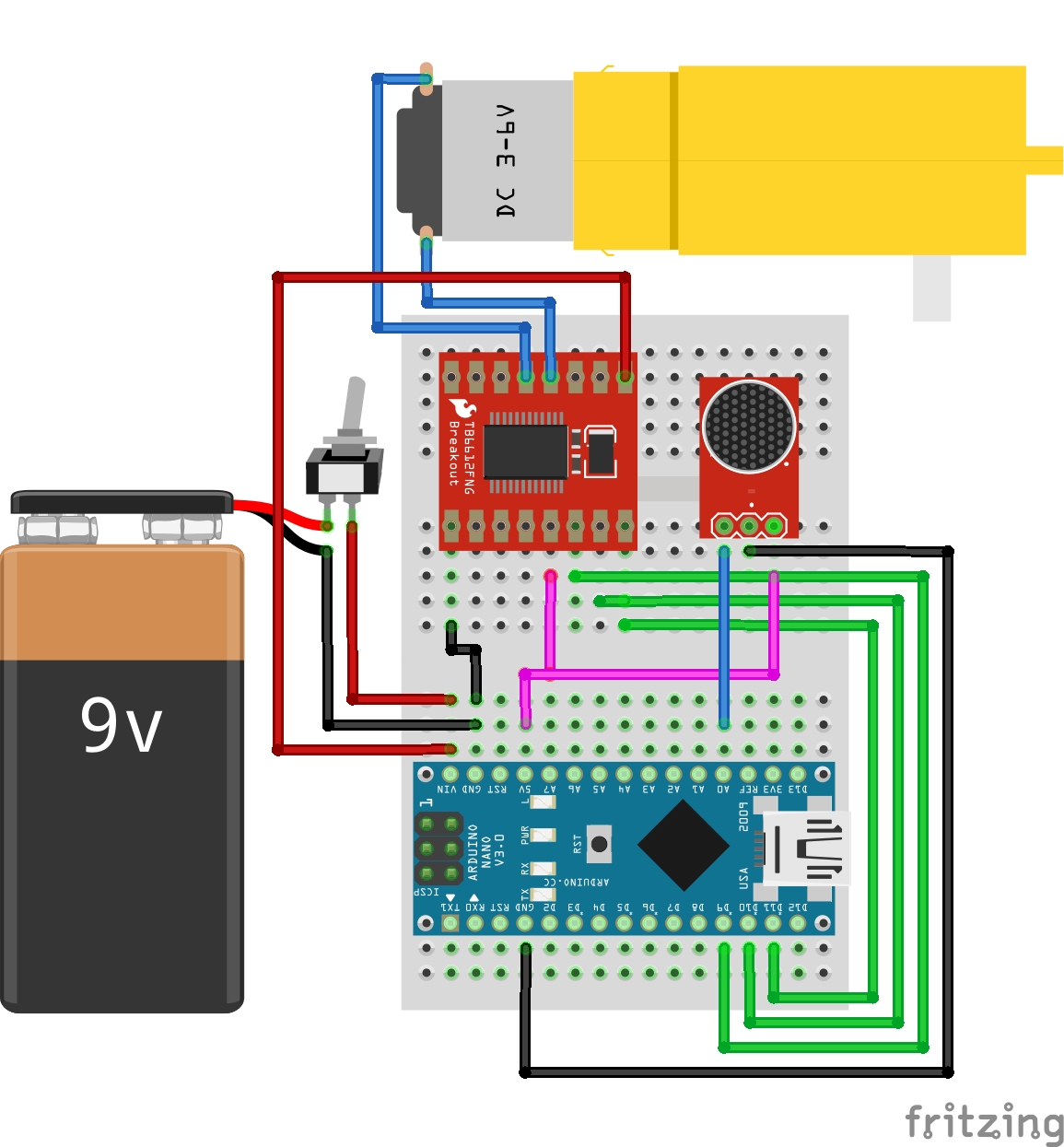
Electronics and wiring
Prepare your screwdriver and soldering iron and carefully follow the video instructions below. Make sure you properly implement the schematic circuit diagram shown in Fig. J, so you don't end up toasting your Arduino board and motor driver.
Electrical Parts Assembly Tutorial
Programming
You can pick up LEGO pieces and let your imagination go limitless. Of course, coding is also the part that you can have lots of fun and be the most creative. You can go to Arduino IDE and write your own code to tell the zipline robot what to do. But for now, let's start with this code.
/* Zipline robot's speed control with clapping The idea: In this code, we want to control the speed of our zipline robot with clapping so that the faster you clap the faster it goes. To do so, we added a microphone to the project. By measuring the loudness of the environment's sound, we determine whether the robot must stop or go. The circuit: - In this circuit, an Arduino nano is used. Any other types of Arduino can be used of course but do not forget to change the pin configurations if you want to change the circuit on your preference. Visit Tart Robotics blog for more information: https://www.tartrobotics.com/blog */
void loop() { unsigned long samplingBeginning = millis(); unsigned int loudness = 0;
unsigned int signalMax = 0; unsigned int signalMin = 1024;
// Sample microphone data while (millis() - samplingBeginning < 100) { sample = analogRead(micPin);
// Measure min and max value of the signal if (sample > signalMax) signalMax = sample; else if (sample < signalMin) signalMin = sample; } loudness = signalMax - signalMin;
// Referesh the clapTime if a clap is detected if (peakToPeak > 300) clapTime = millis();
// Run the motor if a clap is detected recently if (millis() - clapTime < 200)runTheMotor(); else stopTheMotor(); }
// Motor driver pin configuration to run void runTheMotor() { digitalWrite(motorPinA, HIGH); digitalWrite(motorPinB, LOW); analogWrite(motorPinPWM, 255); }
// Motor driver pin configuration to stop void stopTheMotor() { digitalWrite(motorPinA, HIGH); digitalWrite(motorPinB, HIGH); analogWrite(motorPinPWM, 0); }
Complete Zipline Robot
Please let us know what you think about this tutorial by commenting below. Your feedback will help us to improve our future work.
Upload this code to your robot and control its motion by clapping. Your robot starts moving as you clap.
/* Clap Contorled Zipliner Robot The idea: In this project, the robot's motor activates shortly right after a clap is heard from the microphone module. The idea is that you need to clap constantly in order to move the robot across the zipline so that the faster you clap the faster it goes. The circuit: - In this circuit, an Arduino nano is used. Any other types of Arduino can be used of course but do not forget to change the pin configurations if you want to change the circuit on your preference. Visit Tart Robotics blog for more: https://www.tartrobotics.com/blog*/#define micPin A0 //Microphone module's output pin to A0#define motorB1 10 //Driver motor's input IN3 to 10#define motorB2 11 //Driver motor's input IN4 to 11intmicThreshold=800;//Sets the microphone sensitivityintclappingInterval=200;//Sets the claping speeduint16_tclapTime=0;voidsetup(){pinMode(micPin,INPUT_PULLUP);pinMode(motorB1,OUTPUT);pinMode(motorB2,OUTPUT);}voidloop(){uint16_tt=millis();intmicMin=255,micMax=0;while(millis()-t<5){//Sample microphone output for a period of 5 msecsintmic=analogRead(micPin);if(mic>micMax)micMax=mic;elseif(mic<micMin)micMin=mic;}intmicAmp=micMax-micMin;//Read the microphone pick-to-pick valueif(micAmp>micThreshold)clapTime=millis();// Run the motor if a clap is detected recently. Stop otherwiseif(millis()-clapTime<clappingInterval)runTheMotor();elsestopTheMotor();}voidrunTheMotor(){digitalWrite(motorB1,HIGH);digitalWrite(motorB2,LOW);}voidstopTheMotor(){digitalWrite(motorB1,HIGH);digitalWrite(motorB2,HIGH);}













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments