
Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
In Singapore, most people spend the majority of their time indoors, whether it be at home or in the office. We believe that people's quality of life could be greatly improved if the indoor environment they spend so much time in is pleasant and healthy. This is why we initially started working on an indoor environment controller.
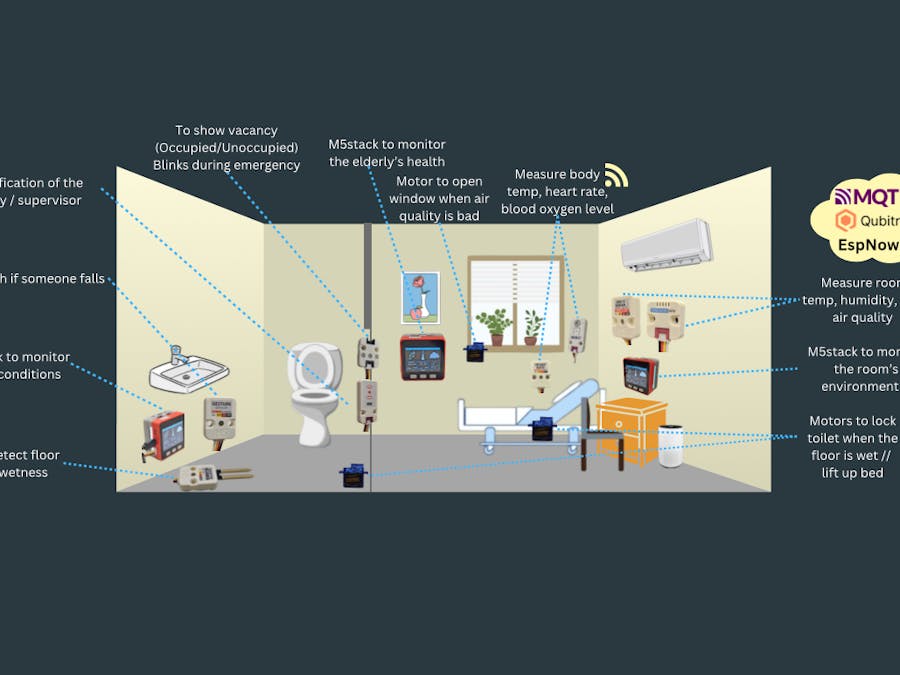
However, we have now decided to expand our focus to include hospices. Our project, the Integrated Hospice Care System, not only controls the room environment (temperature, humidity, and air quality) but also includes a health monitoring unit (with heart rate, SP/O2 and body temperature sensors) and a toilet safety unit (with fall detection).Problems
- The elderly are prone to falls, especially in private areas like toilets where the floor is commonly wet.
- The elderly require a comfortable and healthy environment to live in.
- The elderly are susceptible to illnesses in old age
This project aims to enhance hospice care by developing a system that monitors hospice environments to ensure they are comfortable and pleasant to live in. By automatically assessing factors like air quality and safety, the system will alert nurses if conditions deteriorate or accidents occur, enabling timely interventions for patient well-being.
indoor_enviroment_unit.py
MicroPythonfrom m5stack import *
from m5ui import *
from uiflow import *
import wifiCfg
from m5mqtt import M5mqtt
from libs.json_py import *
import unit
setScreenColor(0x000000)
pahub_0 = unit.get(unit.PAHUB, unit.PORTA, 0x70)
env2_0 = unit.get(unit.ENV2, unit.PAHUB0)
tvoc_0 = unit.get(unit.TVOC, unit.PAHUB1)
servo_0 = unit.get(unit.SERVO, unit.PORTB)
var1 = None
var2 = None
min_humidity = None
max_humidity = None
min_temp = None
max_temp = None
humid_condition = None
temp_condition = None
tvoc_condition = None
condition = None #overall condition used to control RGB bar
tvoc_limit = None
body_temp_condition = None
ac_status = None
ventilation = None
title0 = M5Title(title="Indoor Environment Control Unit", x=3, fgcolor=0x000000, bgcolor=0x45b1e8)
image0 = M5Img(5, 25, "res/default.jpg", True)
image1 = M5Img(110, 25, "res/default.jpg", True)
image2 = M5Img(215, 25, "res/default.jpg", True)
rectangle0 = M5Rect(5, 130, 100, 85, 0x000000, 0x45b1e8)
label0 = M5TextBox(60, 220, "-1", lcd.FONT_Default, 0xFFFFFF, rotate=0)
rectangle1 = M5Rect(110, 130, 100, 85, 0x000000, 0x45b1e8)
rectangle2 = M5Rect(215, 130, 100, 50, 0x000000, 0x45b1e8)
label1 = M5TextBox(240, 220, "+1", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label2 = M5TextBox(140, 220, "Toggle", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label3 = M5TextBox(25, 135, "Humidity", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label4 = M5TextBox(120, 135, "Room Temp", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label5 = M5TextBox(245, 135, "TVOC", lcd.FONT_Default, 0xFFFFFF, rotate=0)
rectangle3 = M5Rect(215, 180, 100, 35, 0x000000, 0x45b1e8)
label6 = M5TextBox(247, 182, "A/C:", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label7 = M5TextBox(238, 198, "Venti:", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label8 = M5TextBox(40, 155, "08", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label9 = M5TextBox(145, 155, "09", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label10 = M5TextBox(250, 155, "10", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label11 = M5TextBox(20, 190, "11", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label12 = M5TextBox(73, 190, "12", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label13 = M5TextBox(125, 190, "13", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label14 = M5TextBox(177, 190, "14", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label15 = M5TextBox(280, 182, "15", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label16 = M5TextBox(280, 198, "16", lcd.FONT_Default, 0xFFFFFF, rotate=0)
line0 = M5Line(M5Line.PLINE, 20, 205, 45, 205, 0xFFFFFF)
line1 = M5Line(M5Line.PLINE, 125, 205, 150, 205, 0xFFFFFF)
line2 = M5Line(M5Line.PLINE, 73, 190, 98, 190, 0xFFFFFF)
line3 = M5Line(M5Line.PLINE, 177, 190, 202, 190, 0xFFFFFF)
line4 = M5Line(M5Line.PLINE, 40, 190, 40, 205, 0xFFFFFF)
line5 = M5Line(M5Line.PLINE, 95, 190, 95, 205, 0xFFFFFF)
line6 = M5Line(M5Line.PLINE, 147, 190, 147, 205, 0xFFFFFF)
line7 = M5Line(M5Line.PLINE, 200, 190, 200, 205, 0xFFFFFF)
triangle0 = M5Triangle(95, 190, 92, 195, 98, 195, 0xFFFFFF, 0xFFFFFF)
triangle1 = M5Triangle(200, 190, 197, 195, 203, 195, 0xFFFFFF, 0xFFFFFF)
triangle2 = M5Triangle(40, 205, 37, 200, 43, 200, 0xFFFFFF, 0xFFFFFF)
triangle3 = M5Triangle(147, 205, 144, 200, 150, 200, 0xFFFFFF, 0xFFFFFF)
from numbers import Number
#var1 and var2 are used to toggle four variables (odd/even - four combinations for 2 var)
#change text color of the selected variable
def toggle_limits():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if var1 % 2 == 0 and var2 % 2 == 0:
label14.setColor(0xffffff)
label11.setColor(0x3366ff)
elif var1 % 2 == 1 and var2 % 2 == 0:
label11.setColor(0xffffff)
label12.setColor(0x3366ff)
elif var1 % 2 == 1 and var2 % 2 == 1:
label12.setColor(0xffffff)
label13.setColor(0x3366ff)
else:
label13.setColor(0xffffff)
label14.setColor(0x3366ff)
#determine himudity, change image accordingly and change the overall conditon
def determine_humidity():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if (env2_0.humidity) < min_humidity:
humid_condition = 'low'
condition = False
image0.changeImg("res/L-Humidity.png")
elif (env2_0.humidity) > max_humidity:
humid_condition = 'high'
condition = False
image0.changeImg("res/H-Humidity.png")
else:
humid_condition = 'normal'
condition = True
image0.changeImg("res/G-Humidity.png")
#determine room temperature, change image accordingly and change the overall conditon
def determine_room_temp():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if (env2_0.temperature) < min_temp:
temp_condition = 'low'
condition = False
image1.changeImg("res/L-Temp.png")
elif (env2_0.temperature) > max_temp:
temp_condition = 'high'
condition = False
image1.changeImg("res/H-Temp.png")
else:
temp_condition = 'normal'
condition = True
image1.changeImg("res/G-Temp.png")
#determine air quality (tvoc) (co2 and other sensor values can be used as well), change image accordingly and change the overall conditon
def determine_tvoc():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if (tvoc_0.TVOC) > tvoc_limit:
tvoc_condition = False
condition = False
image2.changeImg("res/B-TVOC.png")
else:
tvoc_condition = True
condition = True
image2.changeImg("res/G-TVOC.png")
#increase var1 and var2 accordingly to get desired format (4 odd/even combinations)
def buttonB_wasPressed():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if var1 == var2 and var1 % 2 == 0:
var1 = (var1 if isinstance(var1, Number) else 0) + 1
elif var1 == var2 and var1 % 2 == 1:
var1 = (var1 if isinstance(var1, Number) else 0) + 1
else:
var2 = (var2 if isinstance(var2, Number) else 0) + 1
pass
btnB.wasPressed(buttonB_wasPressed)
#decrease the selected limit by 1
def buttonA_wasPressed():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if var1 % 2 == 0 and var2 % 2 == 0:
min_humidity = (min_humidity if isinstance(min_humidity, Number) else 0) + -1
elif var1 % 2 == 1 and var2 % 2 == 0:
max_humidity = (max_humidity if isinstance(max_humidity, Number) else 0) + -1
elif var1 % 2 == 1 and var2 % 2 == 1:
min_temp = (min_temp if isinstance(min_temp, Number) else 0) + -1
else:
max_temp = (max_temp if isinstance(max_temp, Number) else 0) + -1
pass
btnA.wasPressed(buttonA_wasPressed)
#increase the selected limit by 1
def buttonC_wasPressed():
global var1, var2, min_humidity, max_humidity, min_temp, max_temp, humid_condition, temp_condition, tvoc_condition, condition, tvoc_limit, body_temp_condition, ac_status, ventilation
if var1 % 2 == 0 and var2 % 2 == 0:
min_humidity = (min_humidity if isinstance(min_humidity, Number) else 0) + 1
elif var1 % 2 == 1 and var2 % 2 == 0:
max_humidity = (max_humidity if isinstance(max_humidity, Number) else 0) + 1
elif var1 % 2 == 1 and var2 % 2 == 1:
min_temp = (min_temp if isinstance(min_temp, Number) else 0) + 1
else:
max_temp = (max_temp if isinstance(max_temp, Number) else 0) + 1
pass
btnC.wasPressed(buttonC_wasPressed)
wifiCfg.doConnect('Myrios', 'abcdefghi')
if wifiCfg.wlan_sta.isconnected():
m5mqtt = M5mqtt('env_unit', 'broker.qubitro.com', 1883, '5ad1ffd6-d9a8-4e01-9a2b-de9a0f053163', 'w2YLdJEgCOSk2mUHX5BiQjar6DD2Rr3JbEFmr5RP', 300)
m5mqtt.start()
min_humidity = 40
max_humidity = 65
min_temp = 23
max_temp = 30
tvoc_limit = 220
condition = True
tvoc_condition = True
body_temp_condition = 'normal'
humid_condition = 'normal'
temp_condition = 'normal'
ac_status = 0
ventilation = 0
var1 = 0
var2 = 0
servo_0.write_angle(0)
while True:
label8.setText(str(env2_0.humidity))
label9.setText(str(env2_0.temperature))
label10.setText(str(tvoc_0.TVOC))
label15.setText(str(ac_status))
label16.setText(str(ventilation))
label11.setText(str(min_humidity))
label12.setText(str(max_humidity))
label13.setText(str(min_temp))
label14.setText(str(max_temp))
#pre-set good-condition images
image0.changeImg("res/G-Humidity.png")
image1.changeImg("res/G-Temp.png")
image2.changeImg("res/G-TVOC.png")
toggle_limits()
determine_humidity()
determine_room_temp()
determine_tvoc()
#set RGB bar to red except for normal conditions of all sensors
if condition == False:
rgb.setColorAll(0xff0000)
elif humid_condition != 'normal':
rgb.setColorAll(0xff0000)
elif temp_condition != 'normal':
rgb.setColorAll(0xff0000)
elif tvoc_condition == False:
rgb.setColorAll(0xff0000)
else:
rgb.setColorAll(0x33ff33)
#turn on/off air conditioner based on humidity and room temp values
if humid_condition == 'normal' and temp_condition == 'normal':
ac_status = 0
else:
ac_status = 1
#turn on/off air purifier and window based on air quality
if tvoc_condition == True:
ventilation = 0
servo_0.write_angle(0)
else:
ventilation = 1
servo_0.write_angle(90)
#upload sensor data to qubitro using mqtt for further analysis
m5mqtt.publish(str('env_data'), str((py_2_json({'humidity':(env2_0.humidity),'room_temp':(env2_0.temperature),'tvoc':(tvoc_0.TVOC)}))), 0)
wait_ms(2)
health_monitoring_unit.py
MicroPythonfrom m5stack import *
from m5ui import *
from uiflow import *
import wifiCfg
from m5mqtt import M5mqtt
import time
from libs.json_py import *
import unit
setScreenColor(0x000000)
heart_0 = unit.get(unit.HEART, unit.PORTA)
servo_0 = unit.get(unit.SERVO, unit.PORTB)
angle_0 = unit.get(unit.ANGLE, unit.PORTB)
ncir2_1 = unit.get(unit.NCIR2, unit.PORTA)
to_validate = None
temporary = None
hr = None
sp02 = None
body_temp = None
angle = None
label6 = M5TextBox(40, 224, "Measure", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label7 = M5TextBox(197, 224, "Stop Measuring", lcd.FONT_Default, 0xFFFFFF, rotate=0)
header = M5Title(title="Body Monitoring Unit", x=3, fgcolor=0x000000, bgcolor=0x45b1e8)
image0 = M5Img(0, 20, "res/G-BTemp.png", True)
image1 = M5Img(110, 20, "res/G-Heart.png", True)
image2 = M5Img(220, 20, "res/G-SpO2.png", True)
rectangle0 = M5Rect(0, 120, 100, 100, 0x000000, 0x45b1e8)
rectangle1 = M5Rect(110, 120, 100, 100, 0x000000, 0x45b1e8)
rectangle2 = M5Rect(220, 120, 100, 100, 0x000000, 0x45b1e8)
label0 = M5TextBox(7, 129, "Temperature", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label1 = M5TextBox(249, 132, "SP/02", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label2 = M5TextBox(124, 131, "Heart Rate", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label3 = M5TextBox(21, 178, "text", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label4 = M5TextBox(132, 178, "text", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label5 = M5TextBox(242, 178, "text", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
import math
#validating body parameters, changing image and fonts based on sensor values
# validating body temperature
def validate_body_temp(to_validate):
global temporary, hr, sp02, body_temp, angle
if to_validate == 1:
label3.setFont(lcd.FONT_Comic)
if body_temp > 37.2 or body_temp < 35.1: #sick
image0.changeImg("res/Sick.png")
wait(0.3)
else:
image0.changeImg("res/G-BTemp.png") #normal
wait(0.3)
# validating sp/o2
def validate_sp_02(to_validate):
global temporary, hr, sp02, body_temp, angle
if to_validate == 1:
hr = float(hr)
label5.setFont(lcd.FONT_Comic)
if sp02 <= 90: #low/bad
image2.changeImg("res/B-SpO2.png")
wait(0.3)
else: #normal
image2.changeImg("res/G-SpO2.png")
wait(0.3)
hr = int(hr)
# validating heart rate
def validate_hr(to_validate):
global temporary, hr, sp02, body_temp, angle
if to_validate == 1:
label4.setFont(lcd.FONT_Comic)
sp02 = float(sp02)
if hr > 100 or hr < 50: #normal
image1.changeImg("res/B-Heart.png")
wait(0.3)
else: #bad
image1.changeImg("res/G-Heart.png")
wait(0.3)
sp02 = int(sp02)
#temp variable to turn on/off heart rate sensor and ncir2
def buttonC_wasPressed():
global temporary, hr, to_validate, sp02, body_temp, angle
temporary = 0 #off
heart_0.setLedCurrent(0x00, 0x00)
pass
btnC.wasPressed(buttonC_wasPressed)
def buttonA_wasPressed():
global temporary, hr, to_validate, sp02, body_temp, angle
temporary = 1 #on
heart_0.setLedCurrent(0x0F, 0x01)
pass
btnA.wasPressed(buttonA_wasPressed)
wifiCfg.doConnect('Myrios', 'abcdefghi')
if wifiCfg.wlan_sta.isconnected():
m5mqtt = M5mqtt('body_unit', 'broker.qubitro.com', 1883, '995ca20f-70e3-48aa-b7fe-885d6f14d7b3', 'zWXPS6G$Q6Hj3Mg8aGm-5jLx9fzCiO-IUpDLXeI6', 300)
m5mqtt.start()
rgb.setBrightness(100)
heart_0.setMode(0x03)
temporary = 0
body_temp = 36.5
hr = 0
sp02 = 0
while True:
angle = math.ceil((angle_0.read()) / 17 + 11) #math to adjust angle value to servo angle
servo_0.write_angle(angle)
body_temp = ncir2_1.temperature_measure()
hr = heart_0.getHeartRate()
sp02 = heart_0.getSpO2()
if temporary == 0: #turn off sensors
label3.setFont(lcd.FONT_DefaultSmall)
label3.setText('Waiting...')
label5.setFont(lcd.FONT_DefaultSmall)
label5.setText('Waiting...')
label4.setFont(lcd.FONT_DefaultSmall)
label4.setText('Waiting...')
else: #turn on sensors
label3.setText(str(body_temp))
label4.setText(str(hr))
label5.setText(str(sp02))
validate_body_temp(temporary)
validate_hr(temporary)
validate_sp_02(temporary)
if hr > 0 and body_temp > 30: #upload data to qubitro using mqtt for valid valid sensor values
m5mqtt.publish(str('body_data'), str((py_2_json({'heart_rate':hr,'spo2':sp02,'body_temp':body_temp}))), 0)
wait_ms(2)
toilet_safety_unit.py
MicroPythonfrom m5stack import *
from m5ui import *
from uiflow import *
import wifiCfg
import time
import unit
setScreenColor(0x45b1e8)
servo_0 = unit.get(unit.SERVO, unit.PORTB)
pahub_0 = unit.get(unit.PAHUB, unit.PORTA, 0x70)
pbhub_0 = unit.get(unit.PBHUB, unit.PAHUB0)
rfid_0 = unit.get(unit.RFID, unit.PAHUB5)
gesture_0 = unit.get(unit.GESTURE, unit.PAHUB2)
get_gesture = None
Lights = None
FloorWetness = None
Fall = None
i = None
"""The earth sensor we used did not work properly when it is connected to PbHub; under normal condition (i.e., when it is not wet) it reads over 600 moisture, and when the sensor is touched with a wet finger, it reads around 400 moisture.
We tried adjusting the sensitivity, but the earth sensor works as expected only when it is connected to Port B directly, and it refuses to work properly though Port B.
"""
image0 = M5Img(110, 70, "res/16.jpg", True)
label0 = M5TextBox(40, 205, "LOCK ", lcd.FONT_DejaVu18, 0xFFFFFF, rotate=0)
label1 = M5TextBox(209, 205, "UNLOCK", lcd.FONT_DejaVu18, 0xFFFFFF, rotate=0)
title0 = M5Title(title="Toilet System", x=115, fgcolor=0x000000, bgcolor=0xc7c7c7)
label2 = M5TextBox(146, 210, "Text", lcd.FONT_Default, 0xFFFFFF, rotate=0)
image1 = M5Img(110, 70, "res/15.jpg", True)
label3 = M5TextBox(96, 40, "Have you fallen?", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label4 = M5TextBox(10, 50, "Click the ", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label5 = M5TextBox(10, 70, "middle button", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label10 = M5TextBox(134, 195, "Wetness", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label6 = M5TextBox(10, 90, "within", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label7 = M5TextBox(9, 135, "seconds not to", lcd.FONT_Default, 0xFFFFFF, rotate=0)
label8 = M5TextBox(21, 110, "label8", lcd.FONT_Comic, 0xFFFFFF, rotate=0)
label9 = M5TextBox(10, 155, "turn on the", lcd.FONT_Default, 0xFFFFFF, rotate=0)
#turn off toilet light after use
def Turn_Off_Lights():
global get_gesture, Lights, FloorWetness, Fall, i
if Lights == 1:
rgb.setColorAll(0x000000)
Lights = 0
else:
Lights = 0
#defect fall in toilet
def Fall_Detector():
global get_gesture, Lights, FloorWetness, Fall, i
get_gesture = gesture_0.get_gesture()
if get_gesture == (gesture_0.GestureDown):
#show fall instructions
label3.show()
label4.show()
label5.show()
label6.show()
label7.show()
label9.show()
#count 5 seconds before turning on the alarm
for i in range(5, -1, -1):
label8.show()
label8.setText(str(i))
wait(1)
image1.changeImg("res/16.jpg")
if not (btnB.isPressed()) and i != 0: #continue with next iteration if the button is not pressed
continue
elif btnB.isPressed(): #stop the alarm and change text upon button press
label3.hide()
label6.hide()
label7.hide()
label8.hide()
label9.hide()
image1.changeImg("res/15.jpg")
label4.setText('Glad that you')
label5.setText('are safe.')
rgb.setColorAll(0x33ff33)
wait(3)
rgb.setColorAll(0x000000)
label4.hide()
label5.hide()
break
elif i == 0: #counter becomes zerp; turn on fall alarm
Fall = 0
while not ((btnC.isPressed()) or (rfid_0.isCardOn()) == 1):
wait(0.5)
pbhub_0.setColor(1, 0, 3, 0xff0000)
speaker.tone(1800, 200)
wait(0.5)
pbhub_0.setColor(1, 0, 3, 0x000000)
speaker.tone(1800, 200)
wait(0.5)
def buttonA_wasPressed(): #lock toilet after entering
global get_gesture, Lights, FloorWetness, Fall, i
if 600 < FloorWetness: #not wet
servo_0.write_angle(180)
pass
btnA.wasPressed(buttonA_wasPressed)
def buttonC_wasPressed(): #unlock toilet to go out after use
global get_gesture, Lights, FloorWetness, Fall, i
pbhub_0.setColor(1, 0, 3, 0x006600)
servo_0.write_angle(90)
wait(5)
servo_0.write_angle(180)
Turn_Off_Lights()
pass
btnC.wasPressed(buttonC_wasPressed)
wifiCfg.doConnect('Myrios', 'abcdefghi')
if wifiCfg.wlan_sta.isconnected():
gesture_0.begin()
Fall = 0
get_gesture = 0
servo_0.write_angle(180)
image0.hide()
image1.hide()
pbhub_0.setColor(1, 0, 3, 0x006600)
while True:
#hide fall texts
label3.hide()
label4.hide()
label5.hide()
label6.hide()
label7.hide()
label8.hide()
label9.hide()
label2.setText(str(pbhub_0.analogRead(0)))
FloorWetness = pbhub_0.analogRead(0)
#show good/bad image based on floor wetness
if FloorWetness > 600: #not wet
image0.hide()
image1.show()
if FloorWetness > 600 and (rfid_0.isCardOn()) == 1: #not wet and person comes
wait(1)
servo_0.write_angle(90) #unlock door
rgb.setColorAll(0xffffff)
pbhub_0.setColor(1, 0, 3, 0x660000)
Lights = 1
wait(3)
while (rfid_0.isCardOn()) == 0: #detect fall until RFID is read on person exiting
rgb.setColorAll(0x33ffff)
Fall_Detector()
#hide text if there is no actual fall after downward gesture defection
label3.hide()
label4.hide()
label5.hide()
label6.hide()
label7.hide()
label8.hide()
label9.hide()
elif FloorWetness < 600: #floor is wet; lock the door
label10.setColor(0xff0000)
label2.setColor(0xff0000)
image1.hide()
image0.show()
wait_ms(2)









Comments