


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Public spaces including streets, bus/railway stations, markets, shopping malls, hospital premises, banks, parks, playgrounds, community centers, etc. play a vital role in life of social communities. The widely spreading COVID -19 is an acute respiratory disease caused by a novel Corona virus (SARS-CoV-2). This disease is spread through the respiratory droplets or direct contact with COVID-19 affected patients and also through contaminated surfaces or objects. The survival of this virus varies with the temperature, environmental condition, etc., these viruses can be easily inactivated by using chemical disinfectants.
But the use of chemical disinfectant needs periodical refilling and also can causes allergic reaction and breathing problem for Sinuses and Asthma prone people. So here we go for a new technology which is based on UV light radiation to disinfect the microbes and viruses.
Benefits:As we know that the UV-C rays can destroy RNA viruses and can also have the ability of reducing the transmission of microbes which remains active for a long period of time. This UV powered technology can make rid of the problems faced by using chemical disinfectants and can reduce the growth and transmission of bacteria and viruses without contacting the surface. The python script and ESP-32 technology make the robot more autonomous and network-controlled. It can also be operated manually whenever needed.
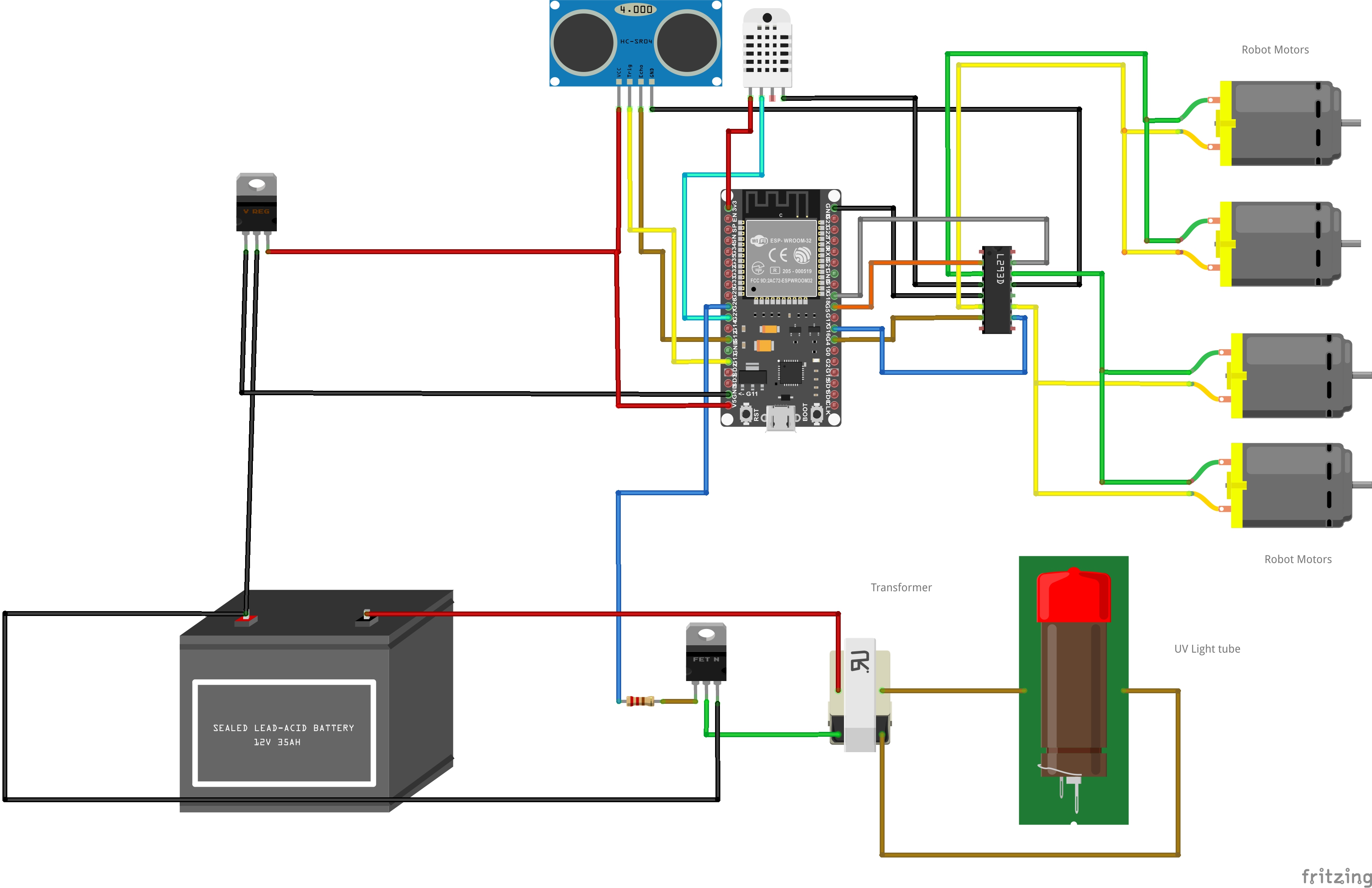
Technology:This UV based Sanitization Robot can be operated in 2 modes. 1) Network controlled Mode and 2) Autonomous mode. The Network Controlled robot which makes use of ESP-32 technology for wireless monitoring and control and Python script for its operation. This system can also be operated manually. An ultrasonic sensor is also used here for autonomous operation by avoiding the obstacles and to prevent disturbing anyone and self-damaging of the robot. Both the UV light and the Robot speed is based on PWM method.
power inverter:A power inverter, or inverter, is a power electronic device or circuitry that changes direct current (DC) to alternating current (AC). The input voltage, output voltage and frequency, and overall power handling depend on the design of the specific device or circuitry. The inverter does not produce any power; the power is provided by the DC source. In this project, we use small size, lightweight and cost-effective inverter. so the Robot cab easily carries everywhere.
This Network controlled autonomous UV Robot is a simple and compact yet effective robot for sanitizing the specified location. The robot is 4 wheeled and can be moved in 4 directions, ie., Left, Right, Front and Reverse. In network-controlled robot, the image processing concept is used. Here a camera is used for scanning the location and sanitize the required areas. In this mode, a person can manually scan the space and can operate and control the robot. Then the network-controlled mode can operate automatically by scanning the place which is plotted like a map and fed into it. A python script is used to run this system. In autonomous mode, the robot uses an ultrasonic sensor to circulate across the entire area, also avoids the obstacles near it and sanitizes the floor in around half an hour. This UV light is AC controlled, but to make it more compact, here we use an inverter circuit to convert the battery power to AC. The MOSFET P55NF06 is used to create a vibration for generating an alternative magnetic flux. The discontinuous signal when given to the MOSFET, it also generates a discontinuous signal. To make it done, a 12V battery is used to feed this signal into a step-up transformer. The transformer then generates an alternative magnetic flux to generate 230V to power the UV light. By controlling the pulse, the intensity of the UV light can be controlled. To control the UV light radiation based on environmental factors, a DHT11 sensor is used. By using this sensor, when temperature is high, the intensity of the UV light should be decreased and also the time period for sanitization can reduced, since we know that the life time of viruses and bacteria are less at high temperature. In contrast, at lower temperature, they are more active and can survive for a ling time, thus the intensity of the UV light should be increased and also the sanitization time period should also be increased.
FeaturesThe UV light can act as a germicide that disinfect bacteria, viruses and protozoa for a specific range of wavelength between 200 and 300 nm. Thus, the adoption of UV light is widespread due to its highly effective to disinfect and safeguard the public places and its chemical-free and environment friendly characteristics.
Since this robot uses an ESP-32 chip, it is a network-controlled and autonomous robot. Thus, it can be monitored and controlled wirelessly and by using the ultrasonic sensor, this robot can avoid obstacles and can work without any manpower for sanitization.
Components Used:ESP-32 Chip
- ESP-32 Chip
L293D Driver
- L293D Driver
Motor (4 Nos.)
- Motor (4 Nos.)
Ultrasonic Sensor
- Ultrasonic Sensor
DHT11 Sensor
- DHT11 Sensor
8V Battery
- 8V Battery
Power Bank
- Power Bank
Charge Connector
- Charge Connector
DC Connector
- DC Connector
Robotic Chassis
- Robotic Chassis
Wheel (4 Nos.)
- Wheel (4 Nos.)
UV light (6 Watts)
- UV light (6 Watts)
Step-Up Transformer
- Step-Up Transformer
P55NF06 MOSFET
- P55NF06 MOSFET




{kind=link}
Comments