clc
clear all
x = readDCA1000_drone('FINAL_DRONE_3.bin');
X=x(1,:);
plot(abs(X))
L = 64; % adc samples per chirp
nchirp = (length(X)/L); %% no of chirps
Xr_trans = vec2mat(X,L) ;
Xr = Xr_trans';
N = length(Xr);
K = N-L+1 ;
for i = 1: K
for j = 1 : L
A(j,i) = Xr(1,i+j-1);
B(j,i) = Xr(2,i+j-1);
C(j,i) = Xr(3,i+j-1);
end
end
Z = A+B+C;
wvd(Xr(1,:),1000);
Tsamp = 0.001 ;
clf;
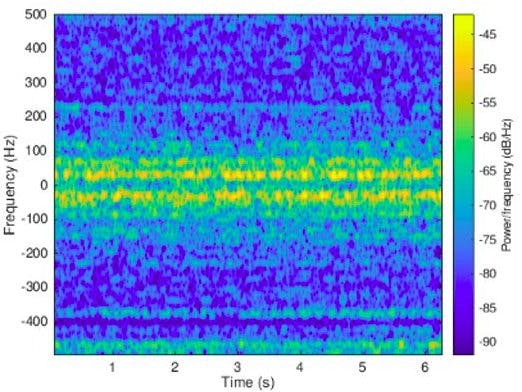
spectrogram(sum(Xr),kaiser(128,10),120,256,1/Tsamp,'centered','yaxis');
clim = get(gca,'CLim');
set(gca,'CLim',clim(2)+[-50 0])
[uxd,sxd,vxd] = svd(Xr);
clf
plot(10*log10(diag(sxd)));
xlabel('Rank');
ylabel('Singular Values');
hold on;
hold on;
plot([8 8],[20 55],'r--');
plot([17 17],[20 55],'r--');
plot([45 45],[20 55],'r--');
text(5,35,'A');
text(15,35,'B');
text(35,35,'C');
text(57,35,'D');
rk = 8:14;
xdr = uxd(:,rk)*sxd(rk,:)*vxd';
clf
spectrogram(sum(xdr),kaiser(128,10),120,256,1/Tsamp,'centered','yaxis');
clim = get(gca,'CLim');
set(gca,'CLim',clim(2)+[-50 0])
[uxd,sxd,vxd] = svd(A);
clf
plot(10*log10(diag(sxd)));
xlabel('Rank');
ylabel('Singular Values');
hold on;
hold on;
plot([8 8],[20 55],'r--');
plot([17 17],[20 55],'r--');
plot([45 45],[20 55],'r--');
text(5,35,'A');
text(15,35,'B');
text(35,35,'C');
text(57,35,'D');
rk = 14:24 ;
xdr = uxd(:,rk)*sxd(rk,:)*vxd';
clf
spectrogram(sum(xdr),kaiser(128,10),120,256,1/Tsamp,'centered','yaxis');
clim = get(gca,'CLim');
set(gca,'CLim',clim(2)+[-50 0])
wvd(sum(xdr),1000);
S = Z'*Z ;
[uxd,sxd,vxd] = svd(S);
clf
plot(10*log10(diag(sxd)));
xlabel('Rank');
ylabel('Singular Values');
hold on;
hold on;
plot([8 8],[20 55],'r--');
plot([17 17],[20 55],'r--');
plot([45 45],[20 55],'r--');
text(5,35,'A');
text(15,35,'B');
text(35,35,'C');
text(57,35,'D');
rk = 8:14;
xdr = uxd(:,rk)*sxd(rk,:)*vxd';
clf
spectrogram(sum(xdr),kaiser(128,10),120,256,1/Tsamp,'centered','yaxis');
clim = get(gca,'CLim');
set(gca,'CLim',clim(2)+[-50 0])
ylim([-0.4 0.4])



_z66WpiLLOG.png)







_z66WpiLLOG.png){kind=link}
Comments