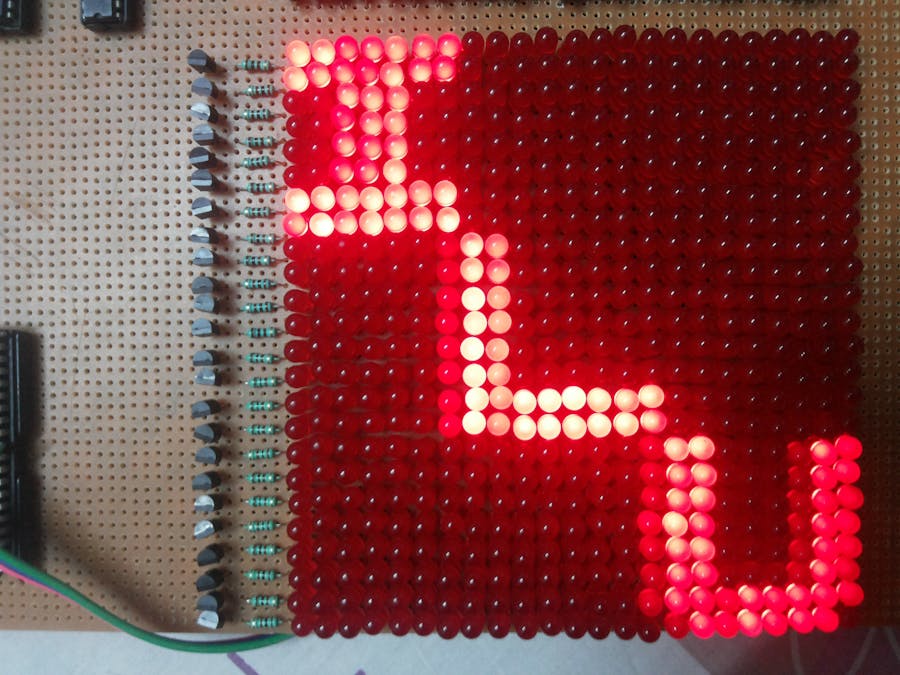
Scrolling LED concept is used to for display various important notices like it is used outside bus to display the location that where that particular bus is going. I have used the same concept to display various pattern to make the VALENTINE DAY special. Various other patterns can be designed depending upon your innovative ideas.
Various Patterns Designed are:1) Heart
2) ILU
Video for easy understanding
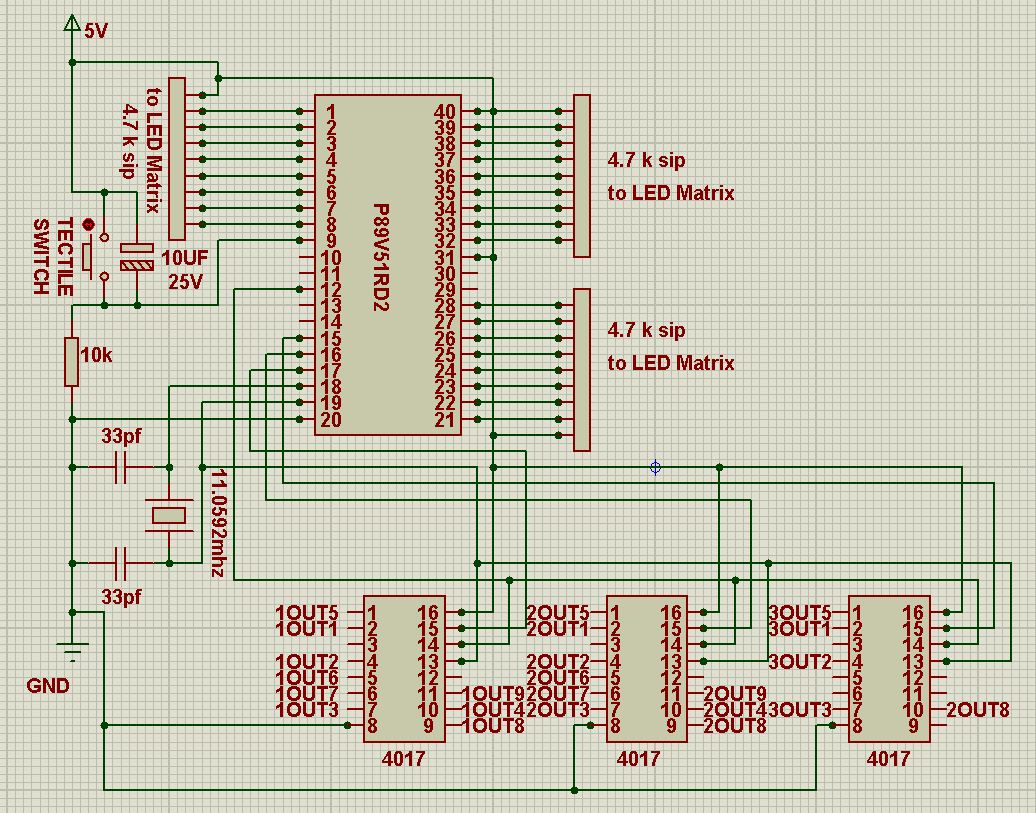
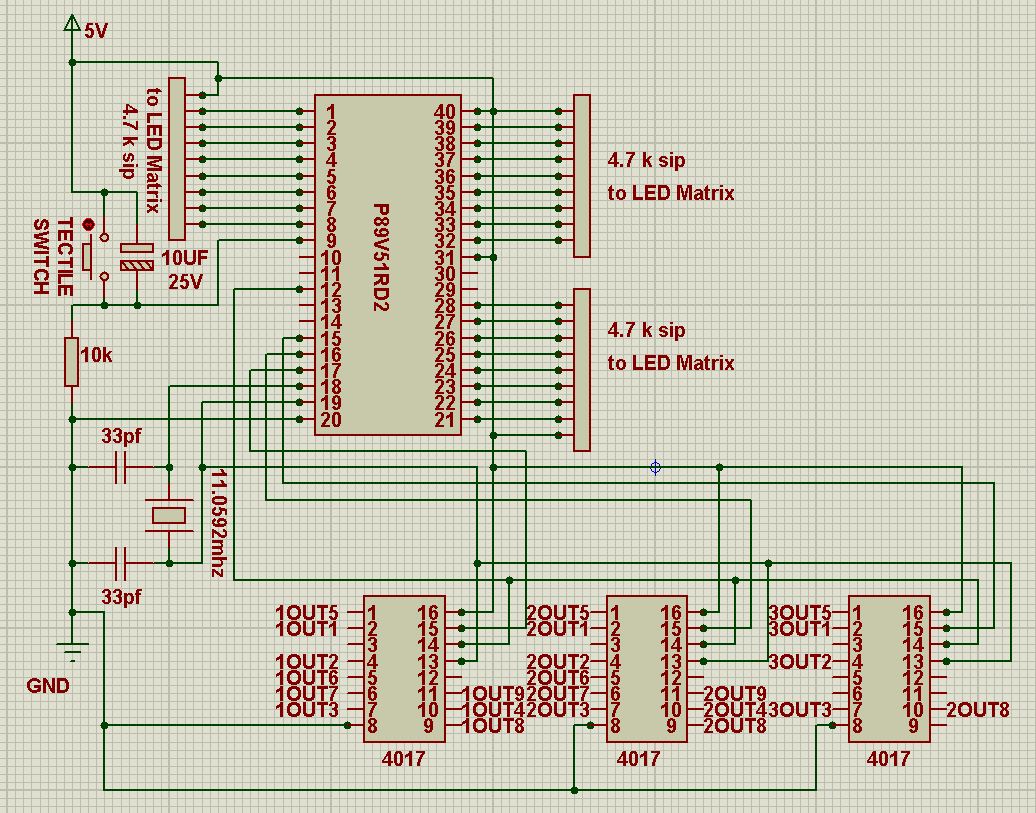
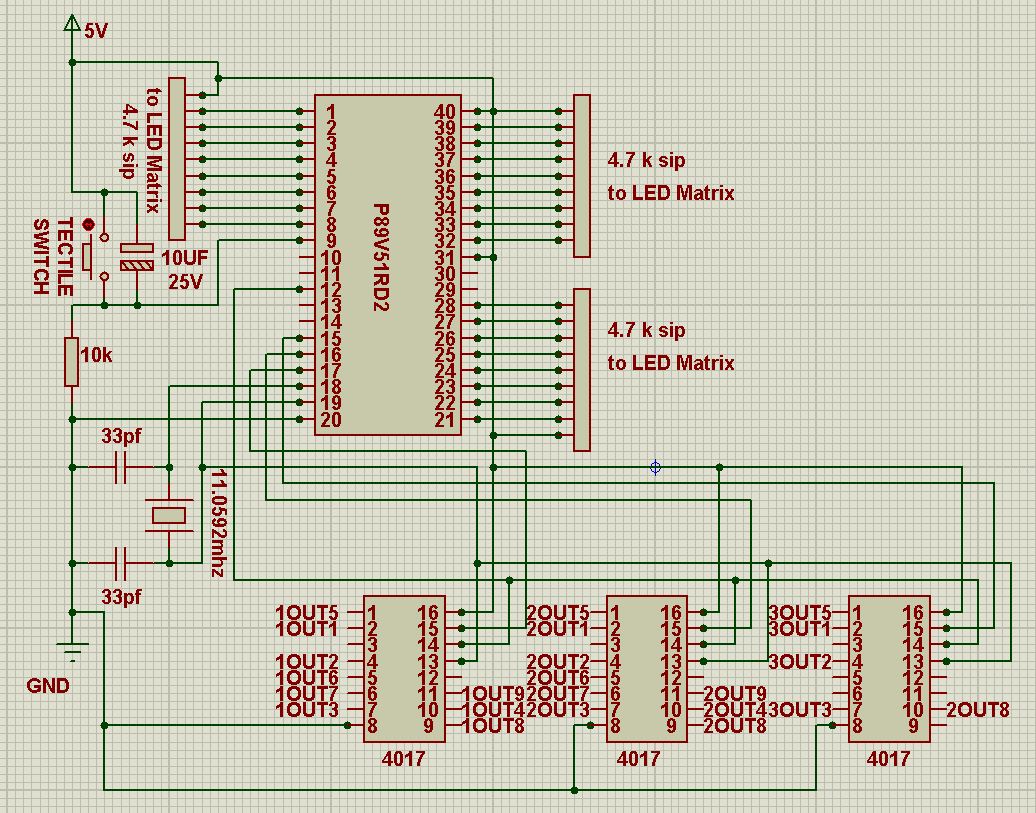
Controller SectionUsing the Microcontroller we can change the content to be displayed on the Scrolling LED like here i have displayed "ILU" and heart.
The voltage requirement for the system is 5V DC supply which can be provided by making on board power supply or the battery source to make it mobile.
Here i have used 5V DC adaptar for that.
The controller used here is P89V51RD2.
The clock for the controller is provided by crystal 11.0592 MHz.
Reset section for microcontroller is designed using 4 pin tectile switch, 10 uf capacitor and 10 k ohm resistance.
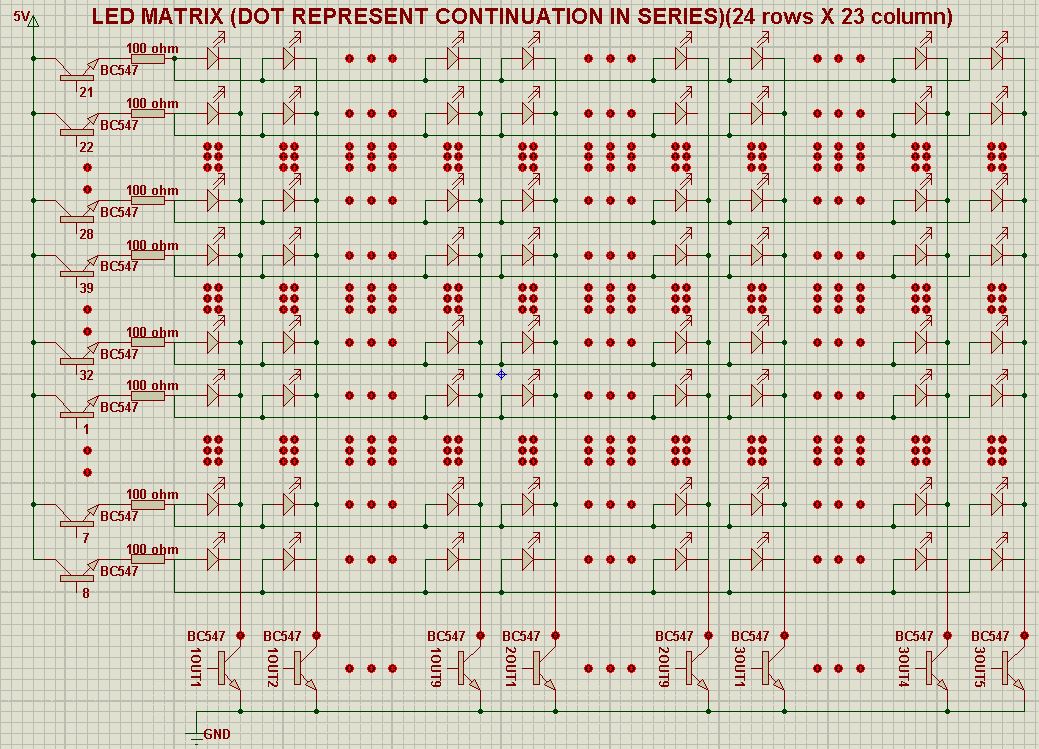
LED Matrix SectionLED matrix is designed by putting all the positive terminal to the row side and connecting it with the microcotroller by using transistor as switch. The transistor used here are BC547. All the negative terminals of the led are connected in the column and they are also connected with the transistor which is performing as a Switch.
If you feel that connection is quite complex on general purpose PCB you can design PCB from the circuit. Here it was on testing basic so I have designed it first on general purpose PCB.
IC 4017
The negative terminal of LED which were connected to the transistor for switching are switched using IC4017. Actually all the LED can be able to glow parallely. So LED of first column glows first by giving data through positive terminal and negative terminal is grounded by switching through IC4017. IC4017 is a shift register IC which will operate the column one by one and the switching is done so fast that it seems that all the LED are running parellely.













{kind=link}
{kind=link}
{kind=link}
Comments