#include <Arduino.h>
#include <Wire.h>
#include <VL53L0X.h>
#include <Adafruit_GFX.h>
#include <Adafruit_ILI9341.h>
#include <Servo.h>
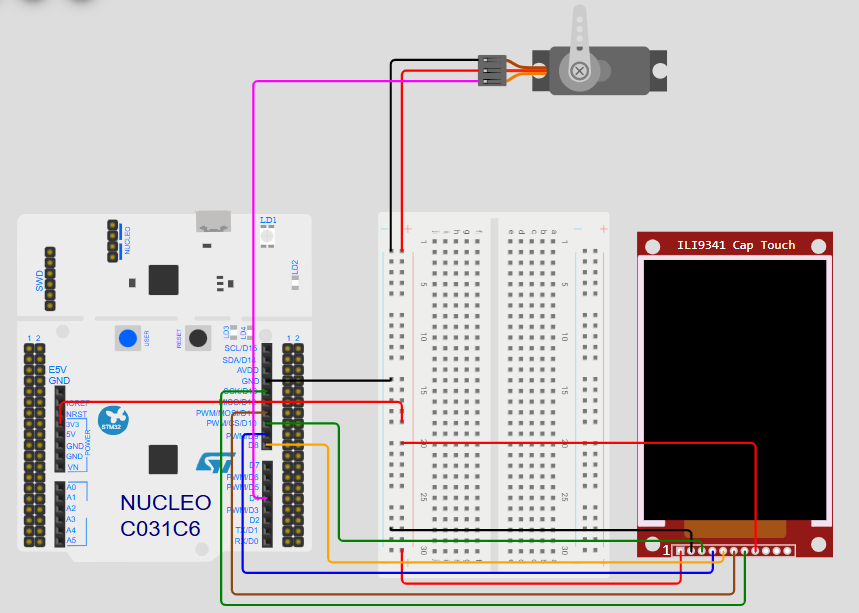
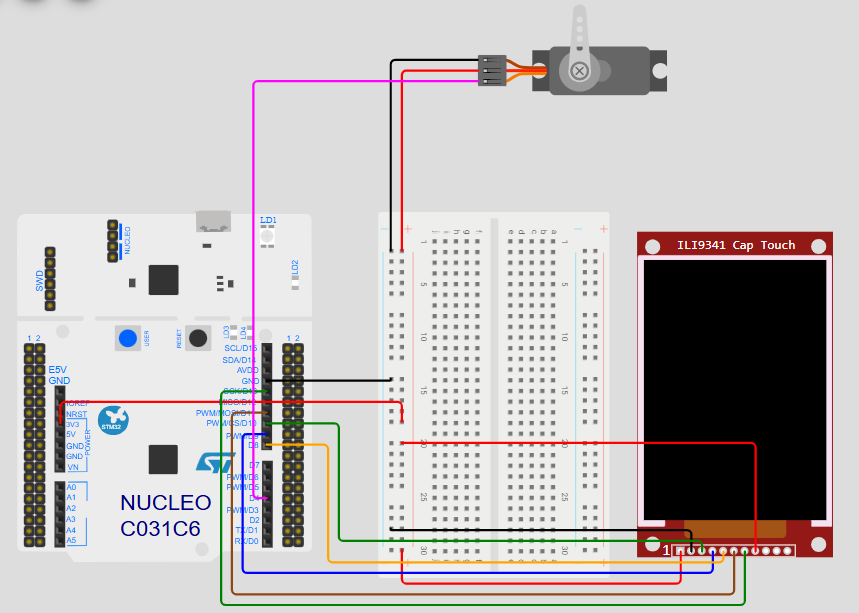
#define TFT_CS 10
#define TFT_DC 8
#define TFT_RST 9
const int servoXPin = 4;
Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC, TFT_RST);
Servo servoX;
VL53L0X sensor;
// Draw a circular arc (radar shape)
void drawRadarArc(int x0, int y0, int radius, int startAngle, int endAngle, uint16_t color)
{
for (int angle = startAngle; angle <= endAngle; angle++)
{
float rad = angle * 3.14159265 / 180.0;
int x = x0 + radius * cos(rad);
int y = y0 - radius * sin(rad);
tft.drawPixel(x, y, color);
}
}
void setup()
{
Serial.begin(115200);
Wire.begin();
tft.begin();
// Check if distance sensor is connected
if (!sensor.init())
{
Serial.println("Error: Missing sensor!");
while (1)
{
tft.fillScreen(ILI9341_BLACK);
tft.setTextColor(ILI9341_WHITE);
tft.setTextSize(2);
tft.setRotation(2);
tft.setCursor(30, 120);
tft.println("Missing sensor!");
}
}
tft.fillScreen(ILI9341_BLACK);
Serial.println("Sensor ready!");
sensor.setTimeout(500);
sensor.startContinuous();
servoX.attach(servoXPin);
tft.fillScreen(ILI9341_BLACK);
Serial.println("Initialization complete");
}
void loop()
{
const int x_centre = 120;
const int y_centre = 160;
const int rayon = 100;
const int distance_max = 1000;
drawRadarArc(x_centre, y_centre, rayon, 160, 380, ILI9341_GREEN);
tft.fillCircle(x_centre, y_centre, 3, ILI9341_GREEN); // Radar center point
int prev_x = x_centre + rayon * cos(160 * 3.14159265 / 180.0);
int prev_y = y_centre - rayon * sin(160 * 3.14159265 / 180.0);
// Radar sweep: left to right
for (int angle = 160; angle <= 380; angle++)
{
if (angle > 160)
{
tft.drawLine(x_centre, y_centre, prev_x, prev_y, ILI9341_BLACK); // Clear previous line
drawRadarArc(x_centre, y_centre, rayon, 160, 380, ILI9341_GREEN);
}
float rad = angle * 3.14159265 / 180.0;
int x_arc = x_centre + rayon * cos(rad);
int y_arc = y_centre - rayon * sin(rad);
tft.drawLine(x_centre, y_centre, x_arc, y_arc, ILI9341_GREEN);
prev_x = x_arc;
prev_y = y_arc;
int servoAngle = map(angle, 160, 380, 0, 180);
servoX.write(servoAngle); // Move servo accordingly
uint16_t distance = sensor.readRangeContinuousMillimeters();
// Display distance only if valid
if (!sensor.timeoutOccurred() && distance > 50 && distance <= distance_max)
{
float ratio = (float)distance / distance_max;
int r_obj = (int)(ratio * rayon);
int x_obj = x_centre + r_obj * cos(rad);
int y_obj = y_centre - r_obj * sin(rad);
int oldRotation = tft.getRotation();
tft.setTextSize(2);
tft.setTextColor(ILI9341_WHITE);
tft.setRotation(2);
tft.fillRect(30, 250, 190, 15, ILI9341_BLACK); // Clear old text
tft.setCursor(30, 250);
tft.println("Distance = " + String(distance) + "mm");
tft.setRotation(oldRotation);
tft.fillCircle(x_obj, y_obj, 2, ILI9341_RED); // Draw detected object
}
delay(15); // Smooth sweep
}
tft.drawLine(x_centre, y_centre, prev_x, prev_y, ILI9341_BLACK);
drawRadarArc(x_centre, y_centre, rayon, 160, 380, ILI9341_GREEN);
// Radar sweep: right to left
for (int angle = 380; angle >= 160; angle--)
{
if (angle < 380)
{
tft.drawLine(x_centre, y_centre, prev_x, prev_y, ILI9341_BLACK);
drawRadarArc(x_centre, y_centre, rayon, 160, 380, ILI9341_GREEN);
}
float rad = angle * 3.14159265 / 180.0;
int x_arc = x_centre + rayon * cos(rad);
int y_arc = y_centre - rayon * sin(rad);
tft.drawLine(x_centre, y_centre, x_arc, y_arc, ILI9341_GREEN);
prev_x = x_arc;
prev_y = y_arc;
int servoAngle = map(angle, 160, 380, 0, 180);
servoX.write(servoAngle);
uint16_t distance = sensor.readRangeContinuousMillimeters();
if (!sensor.timeoutOccurred() && distance > 50 && distance <= distance_max)
{
float ratio = (float)distance / distance_max;
int r_obj = (int)(ratio * rayon);
int x_obj = x_centre + r_obj * cos(rad);
int y_obj = y_centre - r_obj * sin(rad);
int oldRotation = tft.getRotation();
tft.setTextSize(2);
tft.setTextColor(ILI9341_WHITE);
tft.setRotation(2);
tft.fillRect(30, 250, 190, 15, ILI9341_BLACK);
tft.setCursor(30, 250);
tft.println("Distance = " + String(distance) + "mm");
tft.setRotation(oldRotation);
tft.fillCircle(x_obj, y_obj, 2, ILI9341_RED);
}
delay(15);
}
tft.drawLine(x_centre, y_centre, prev_x, prev_y, ILI9341_BLACK);
drawRadarArc(x_centre, y_centre, rayon, 160, 380, ILI9341_GREEN);
}
















{kind=link}
Comments