/*
WALTER - THE 4 LEGGED PHOTOVORE
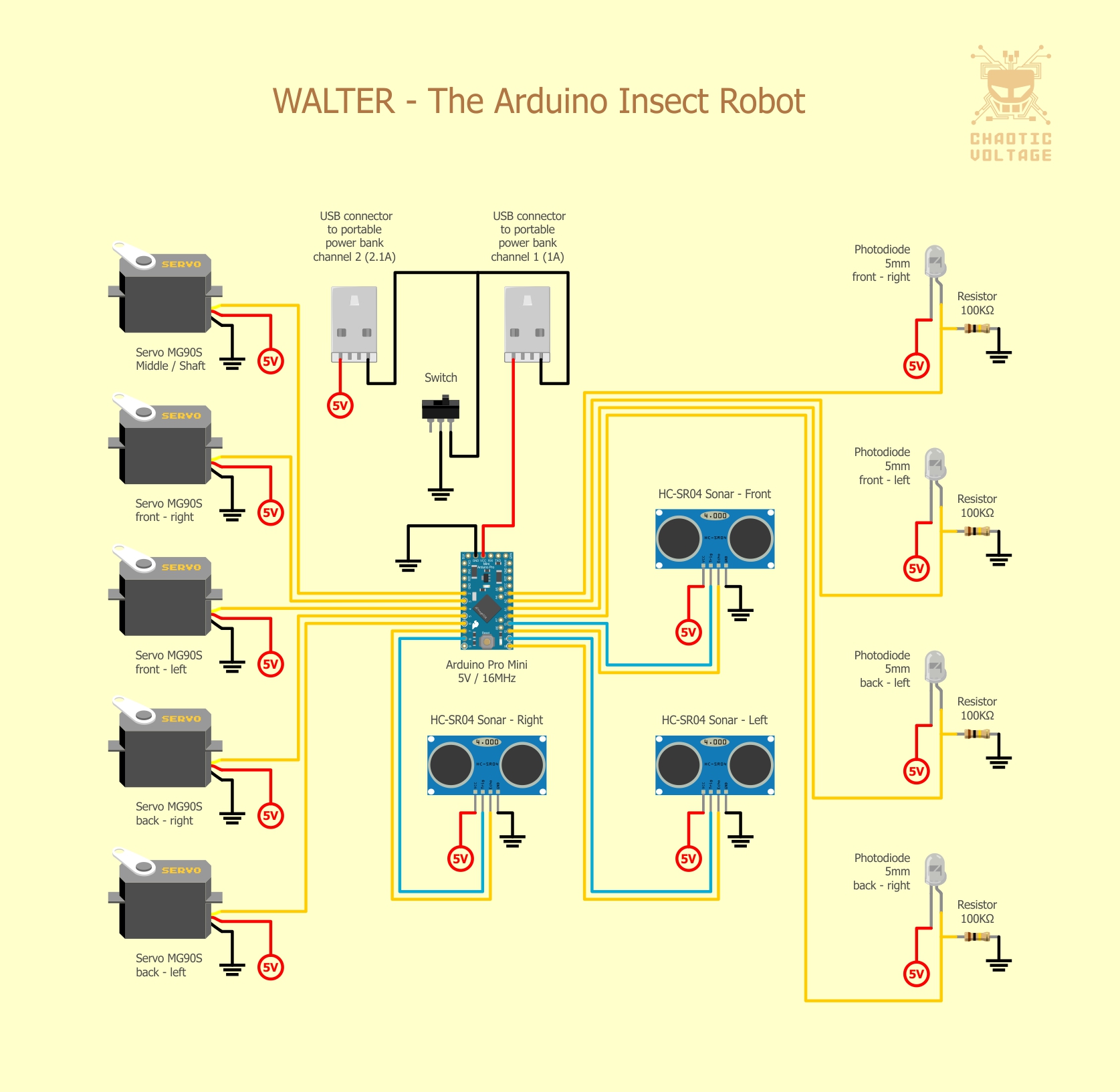
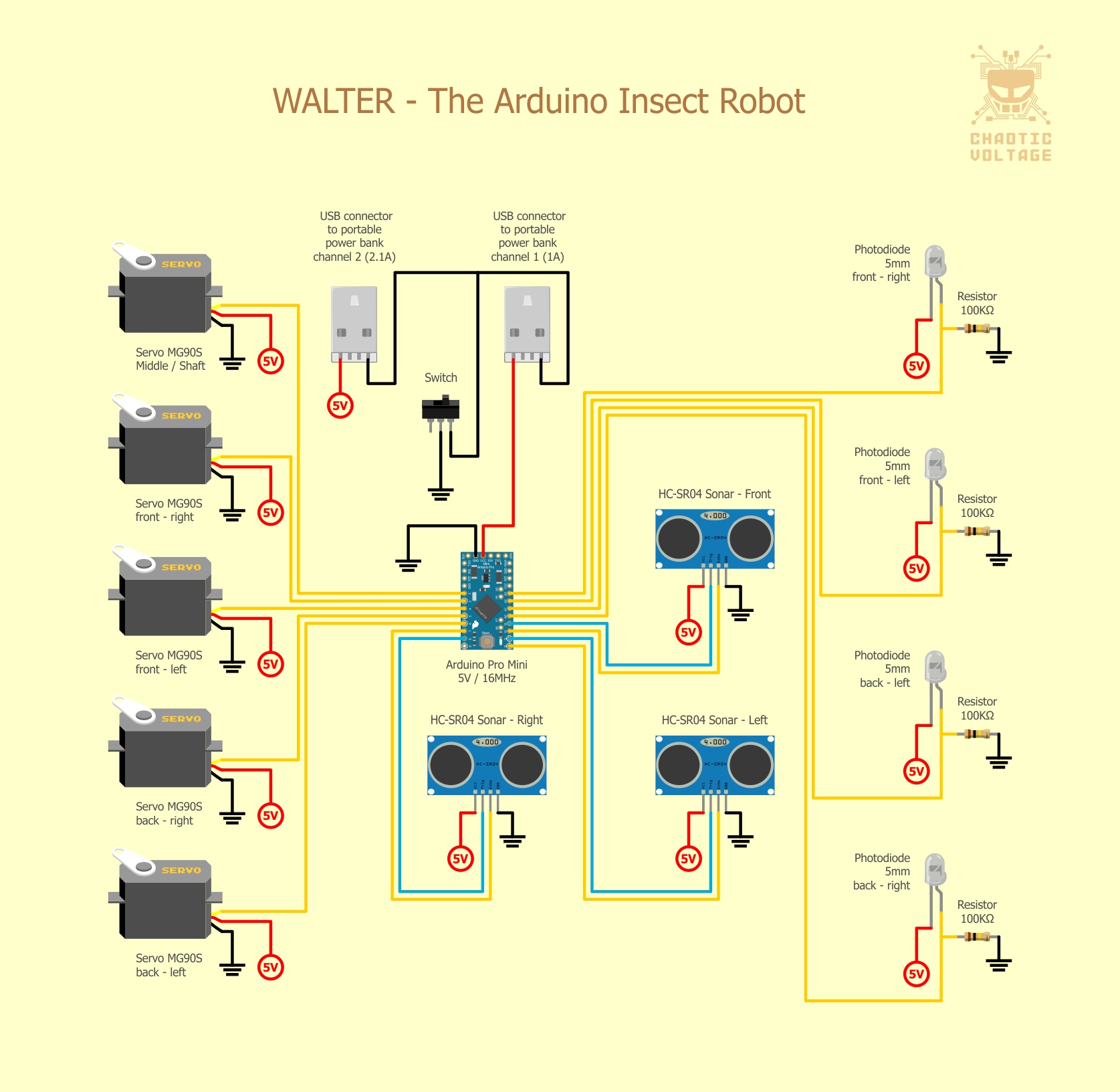
This Arduino sketch is my attemp to build a 5 servo quadruped (4 legged) robot named "WALTER".
In order to use this sketch, you might need to change some values for your convenient or to adjust to your own hardware set up.
Find (Ctrl + F) these marks to easily search which values might need to be changed:
- **** : These marks mean they are servos' center potition and have to calibrated (your robot legs' potitioning when it's idle).
- *** : These marks mean arduino pins asignment (sensors & servos connection to arduino). Refer to this when you build the robot.
- ** : These marks mean that the values optionally can be changed according to your taste (legs' step width, how much to turn when sensing light/obstacle, etc). Just leave it as is if you don't know what you were doing.
You can use this sketch at your own risk.. and, it's provided as is and.. uh..
What're those all about copyrights stuff people use to write at published source code??
The point is I don't want to be held responsible if something bad happened when you were using this codes.
Have fun!
Yohanes Martedi - 2015
*/
#include <Servo.h>
// ****Calibrate servos' center angle (in microseconds because we'll use "xx.writeMicroseconds();" command). Start with 1500.
const int ANGLE_mid_Shaft = 1520;
const int ANGLE_mid_FLeft = 1550;
const int ANGLE_mid_FRight = 1570;
const int ANGLE_mid_BLeft = 1450;
const int ANGLE_mid_BRight = 1450;
const int ANGLE_sweep = 250; // **Set this value (in microseconds) to determine how wide the servos will sweep (legs' step width). Bigger value means wider sweep angle.
const int ANGLE_res = 10; // **Set the servo movement resolution (in microseconds) at least at minimum servo's default dead band width (highest resolution) or more (less resolution). Example: SG90 servo dead band width is 10 microseconds.
int sweepSPEED; // variable to determine how fast the servos will sweep.
int sweepSPEED_Rand[3] = {4, 6, 8}; // **Servo speed (gait speed) will change randomly in 3 modes. Set the speed (in miliseconds) for each mode. Smaller value means faster.
const int ANGLE_turnMAX = ANGLE_sweep * 1.5; // **Set this value to determine how much maximum the bot will turn toward light. Bigger value means bigger turn.
const int ANGLE_turnNARROW = ANGLE_sweep * 0.25; // **Set this value to determine how much maximum the bot will turn avoiding objects at its sides in narrow space. Bigger value means bigger turn.
const int SONAR_sum = 3; // Amount of sonars used.
const int PHOTO_sum = 4; // Amount of photodiodes used.
int PIN_trig[SONAR_sum] = {13, 11, 8}; // ***Set arduino pins connected to ultrasonic sensors' trigger pins; {front, left, right}.
int PIN_ec[SONAR_sum] = {12, 10, 7}; // ***Set arduino pins connected to ultrasonic sensors' echo pins; {front, left, right}.
int PIN_PHOTO[PHOTO_sum] = {2, 3, 1, 0}; // ***Set arduino analog input pins connected to photodiodes; {front left, front right, back left, back right}.
const int distRotate = 25; // **Configure minimum distance (in cm) between the robot and obstacle before the robot avoid it by rotating.
const int distRetreat = 10; // **Configure minimum distance (in cm) between the robot and obstacle before the robot avoid it by retreating.
const int distTurn = 20; // **Configure minimum distance (in cm) between the robot and obstacle before the robot avoid it by turning.
const int counter_gait_max = 8; // **Configure how many steps the robot will take to avoid obstacle (when rotating or retreating).
// **Configure how long the bot rest & run (in milliseconds).
const int RUN_time = 25000;
const int REST_time = 3000;
// ID's for sonars:
int SONAR_id;
const int FRONT = 0;
const int LEFT = 1;
const int RIGHT = 2;
// ID's for photodiodes:
const int FRONT_LEFT = 0;
const int FRONT_RIGHT = 1;
const int BACK_LEFT = 2;
const int BACK_RIGHT = 3;
// Variables for photodiodes reading:
int PHOTO_Front_Left;
int PHOTO_Front_Right;
int PHOTO_Back_Left;
int PHOTO_Back_Right;
const int SONAR_TrigSig = 10; // Duration (in S) of trigger signal the sensors needed to produce ultrasonic sound (already specified by the products, don't change this value).
const unsigned long SONAR_MaxEc = 50000; // Maximum duration (in S) of the echo signal given by the sensors (already specified by the products, don't change this value).
const float SOUND_speed = 0.034; // The speed of sound on air in S/cm (already specified by sciene, avatar Aang is needed to do air bending if this value is wanted to be changed).
int distance[SONAR_sum]; // Results of the calculation of distance.
// Ddeclaration of servos:
Servo SERVO_shaft;
Servo SERVO_front_left;
Servo SERVO_front_right;
Servo SERVO_back_left;
Servo SERVO_back_right;
// Variables for each servos' angles:
int ANGLE_shaft = ANGLE_mid_Shaft;
int ANGLE_front_left = ANGLE_mid_FLeft;
int ANGLE_front_right = ANGLE_mid_FRight;
int ANGLE_back_left = ANGLE_mid_BLeft;
int ANGLE_back_right = ANGLE_mid_BRight;
// Angle manipulation for middle servo (shaft).
const int ANGLE_max_Shaft = ANGLE_mid_Shaft + ANGLE_sweep;
const int ANGLE_min_Shaft = ANGLE_mid_Shaft - ANGLE_sweep;
int ANGLE_sweep_val;
// Variables for recording current angles of each servos:
int ANGLE_shaft_record;
int ANGLE_front_left_record;
int ANGLE_front_right_record;
int ANGLE_back_left_record;
int ANGLE_back_right_record;
// Variables for servos angles correction according to light detection:
int LIGHT_left;
int LIGHT_right;
// Variables for servos angles correction according to sonar detection:
int SONAR_left;
int SONAR_right;
// That things such as flags, counters, records that I'm always not sure how to explain. :(
int ANGLE_prev;
int flag_shaft_reverse;
int flag_transition_rotate;
int flag_transition_start = 1;
int flag_rest = 0;
int flag_RUN_time = 0;
int rotate_random;
int counter_gait;
void setup() {
// Serial.begin(9600); // Serial.. you know, checking & debugging..
SERVO_shaft.attach(2); // ***Set up horizontal (shaft) servo's signal pin on arduino.
SERVO_front_left.attach(4); // ***Set up front-left servo's signal pin on arduino.
SERVO_front_right.attach(3); // ***Set up front-right servo's signal pin on arduino.
SERVO_back_left.attach(6); // ***Set up back-left servo's signal pin on arduino.
SERVO_back_right.attach(5); // ***Set up back-right servo's signal pin on arduino.
// Get the servos ready at their middle angles.
SERVO_shaft.writeMicroseconds(ANGLE_mid_Shaft);
SERVO_front_left.writeMicroseconds(ANGLE_mid_FLeft);
SERVO_front_right.writeMicroseconds(ANGLE_mid_FRight);
SERVO_back_left.writeMicroseconds(ANGLE_mid_BLeft);
SERVO_back_right.writeMicroseconds(ANGLE_mid_BRight);
// Setting pins for sonars, both pinMode and value.
for(SONAR_id = 0; SONAR_id < SONAR_sum; SONAR_id++) {
pinMode(PIN_trig[SONAR_id],OUTPUT);
pinMode(PIN_ec[SONAR_id],INPUT);
digitalWrite(PIN_trig[SONAR_id], LOW);
}
randomSeed(analogRead(5)); // Using analog pin 5 to generate random values to be used later.
SONAR_READ_ALL(); // Initiate first sonar reading before doing anything,
SONAR_READ_ALL(); // and actually I forget why I have to call it twice for the first time. But believe me, it's needed.
START(); // This function make sure which legs are lifted randomly at the first step.
delay(3000); // **dum.. daa.. dum..
}
void loop() {
int state = random(0,2);
if(state == 0) {
REST();
}
else {
int randomSPEED = random(0,3);
sweepSPEED = sweepSPEED_Rand[randomSPEED];
RUN();
flag_rest = 0;
}
}
void REST() {
if(flag_rest == 0) {
TRANSITION_GAIT();
flag_rest = 1;
}
delay(REST_time);
}
void RUN() {
unsigned long TIMER_state = millis();
while((millis() - TIMER_state) <= RUN_time) {
if(distance[FRONT] > distRotate) {
flag_RUN_time = 0;
while(flag_RUN_time == 0) {
FORWARD();
}
}
while(distance[FRONT] > distRetreat && distance[FRONT] <= distRotate) {
while(distance[LEFT] > distance[RIGHT]) {
ROTATE_LEFT_AVOID();
break;
}
while(distance[LEFT] < distance[RIGHT]) {
ROTATE_RIGHT_AVOID();
break;
}
while(distance[LEFT] == distance[RIGHT]) {
ROTATE_RANDOM_AVOID();
break;
}
}
while(distance[FRONT] <= distRetreat) {
RETREAT_AVOID();
}
}
}
/*________________________________________________________________________________________
########################################## GAIT ########################################*/
/*=================================== SHAFT MOVEMENT ===================================*/
void SHAFT() {
unsigned long TIMER_servo = millis();
while((millis() - TIMER_servo) <= sweepSPEED) {
while(ANGLE_shaft == ANGLE_mid_Shaft) {
counter_gait++;
SONAR_READ_ALL();
LIGHT_COMPARE_EXECUTE();
SIDE_AVOID();
flag_RUN_time = 1;
break;
}
}
if(ANGLE_prev < ANGLE_shaft && ANGLE_shaft < ANGLE_max_Shaft) {
ANGLE_prev = ANGLE_shaft;
ANGLE_shaft += ANGLE_res;
}
else if(ANGLE_shaft >= ANGLE_max_Shaft) {
ANGLE_prev = ANGLE_shaft;
ANGLE_shaft -= ANGLE_res;
}
else if(ANGLE_prev > ANGLE_shaft && ANGLE_shaft > ANGLE_min_Shaft) {
ANGLE_prev = ANGLE_shaft;
ANGLE_shaft -= ANGLE_res;
}
else if(ANGLE_shaft <= ANGLE_min_Shaft) {
ANGLE_prev = ANGLE_shaft;
ANGLE_shaft += ANGLE_res;
}
SERVO_shaft.writeMicroseconds(ANGLE_shaft);
}
void SHAFT_REVERSE() {
if(ANGLE_prev < ANGLE_shaft) {
ANGLE_prev = ANGLE_shaft + 1;
}
else if(ANGLE_prev > ANGLE_shaft) {
ANGLE_prev = ANGLE_shaft - 1;
}
}
/*================================ END OF SHAFT MOVEMENT ================================*/
/*===================================== TRANSITION =====================================*/
void TRANSITION_GAIT() {
ANGLE_front_left_record = ANGLE_front_left;
ANGLE_front_right_record = ANGLE_front_right;
ANGLE_back_left_record = ANGLE_back_left;
ANGLE_back_right_record = ANGLE_back_right;
ANGLE_shaft_record = ANGLE_shaft;
int flag = HIGH;
int counter = 0;
while(flag == HIGH) {
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
counter++;
ANGLE_front_left = map(counter, 1, ((ANGLE_sweep * 2) / ANGLE_res), ANGLE_front_left_record, ANGLE_mid_FLeft);
ANGLE_front_right = map(counter, 1, ((ANGLE_sweep * 2) / ANGLE_res), ANGLE_front_right_record, ANGLE_mid_FRight);
ANGLE_back_left = map(counter, 1, ((ANGLE_sweep * 2) / ANGLE_res), ANGLE_back_left_record, ANGLE_mid_BLeft);
ANGLE_back_right = map(counter, 1, ((ANGLE_sweep * 2) / ANGLE_res), ANGLE_back_right_record, ANGLE_mid_BRight);
SERVO_shaft.writeMicroseconds(ANGLE_shaft);
SERVO_front_left.writeMicroseconds(ANGLE_front_left);
SERVO_front_right.writeMicroseconds(ANGLE_front_right);
SERVO_back_left.writeMicroseconds(ANGLE_back_left);
SERVO_back_right.writeMicroseconds(ANGLE_back_right);
if(counter == ((ANGLE_sweep * 2) / ANGLE_res)) {
flag = LOW;
START();
flag_transition_rotate = 0;
}
}
}
void TRANSITION_START() {
if(ANGLE_shaft == ANGLE_mid_Shaft || (ANGLE_shaft > ANGLE_mid_Shaft && ANGLE_shaft > ANGLE_prev) || (ANGLE_shaft < ANGLE_mid_Shaft && ANGLE_shaft < ANGLE_prev)) {
ANGLE_sweep_val = 0;
}
else {
flag_transition_start = 0;
}
}
void START() {
ANGLE_prev = random((ANGLE_shaft), (ANGLE_shaft + 2));
if(ANGLE_prev == ANGLE_shaft) {
ANGLE_prev -= 1;
}
flag_transition_start = 1;
}
int ROTATE_RANDOM() {
return random(0, 2);
}
/*================================== END OF TRANSITION ==================================*/
/*======================================== WALK ========================================*/
void FORWARD() {
while(flag_transition_rotate == 2) {
TRANSITION_GAIT();
}
flag_transition_rotate = 1;
while(flag_shaft_reverse == 0) {
SHAFT_REVERSE();
break;
}
flag_shaft_reverse = 1;
while(flag_transition_start == 1) {
SHAFT();
TRANSITION_START();
WALK();
}
SHAFT();
ANGLE_sweep_val = ANGLE_sweep;
WALK();
}
void RETREAT() {
while(flag_transition_rotate == 2) {
TRANSITION_GAIT();
}
flag_transition_rotate = 1;
while(flag_shaft_reverse == 1) {
SHAFT_REVERSE();
break;
}
flag_shaft_reverse = 0;
while(flag_transition_start == 1) {
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
TRANSITION_START();
WALK();
}
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
ANGLE_sweep_val = (ANGLE_sweep * -1);
WALK();
}
void WALK() {
if(ANGLE_shaft >= ANGLE_mid_Shaft && ANGLE_prev < ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, ((ANGLE_mid_FLeft - ANGLE_sweep_val) + LIGHT_left + SONAR_left), ANGLE_mid_FLeft);
ANGLE_front_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, ((ANGLE_mid_FRight - ANGLE_sweep_val) - LIGHT_right - SONAR_right), ANGLE_mid_FRight);
ANGLE_back_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, ((ANGLE_mid_BLeft + ANGLE_sweep_val) - LIGHT_left - SONAR_left), ANGLE_mid_BLeft);
ANGLE_back_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, ((ANGLE_mid_BRight + ANGLE_sweep_val) + LIGHT_right + SONAR_right), ANGLE_mid_BRight);
}
else if(ANGLE_shaft >= ANGLE_mid_Shaft && ANGLE_prev > ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FLeft, ((ANGLE_mid_FLeft + ANGLE_sweep_val) - LIGHT_left - SONAR_left));
ANGLE_front_right = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FRight, ((ANGLE_mid_FRight + ANGLE_sweep_val) + LIGHT_right + SONAR_right));
ANGLE_back_left = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BLeft, ((ANGLE_mid_BLeft - ANGLE_sweep_val) + LIGHT_left + SONAR_left));
ANGLE_back_right = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BRight, ((ANGLE_mid_BRight - ANGLE_sweep_val) - LIGHT_right - SONAR_right));
}
else if(ANGLE_shaft < ANGLE_mid_Shaft && ANGLE_prev > ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, ((ANGLE_mid_FLeft + ANGLE_sweep_val) - LIGHT_left - SONAR_left), ANGLE_mid_FLeft);
ANGLE_front_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, ((ANGLE_mid_FRight + ANGLE_sweep_val) + LIGHT_right + SONAR_right), ANGLE_mid_FRight);
ANGLE_back_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, ((ANGLE_mid_BLeft - ANGLE_sweep_val) + LIGHT_left + SONAR_left), ANGLE_mid_BLeft);
ANGLE_back_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, ((ANGLE_mid_BRight - ANGLE_sweep_val) - LIGHT_right - SONAR_right), ANGLE_mid_BRight);
}
else if(ANGLE_shaft < ANGLE_mid_Shaft && ANGLE_prev < ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FLeft, ((ANGLE_mid_FLeft - ANGLE_sweep_val) + LIGHT_left + SONAR_left));
ANGLE_front_right = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FRight, ((ANGLE_mid_FRight - ANGLE_sweep_val) - LIGHT_right - SONAR_right));
ANGLE_back_left = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BLeft, ((ANGLE_mid_BLeft + ANGLE_sweep_val) - LIGHT_left - SONAR_left));
ANGLE_back_right = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BRight, ((ANGLE_mid_BRight + ANGLE_sweep_val) + LIGHT_right + SONAR_right));
}
SERVO_front_left.writeMicroseconds(ANGLE_front_left);
SERVO_front_right.writeMicroseconds(ANGLE_front_right);
SERVO_back_left.writeMicroseconds(ANGLE_back_left);
SERVO_back_right.writeMicroseconds(ANGLE_back_right);
}
/*===================================== END OF WALK =====================================*/
/*======================================= ROTATE =======================================*/
void ROTATE_LEFT() {
while(flag_transition_rotate == 1) {
TRANSITION_GAIT();
}
flag_transition_rotate = 2;
while(flag_shaft_reverse == 2) {
SHAFT_REVERSE();
break;
}
flag_shaft_reverse = 3;
while(flag_transition_start == 1) {
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
TRANSITION_START();
ROTATE();
}
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
ANGLE_sweep_val = ANGLE_sweep;
ROTATE();
}
void ROTATE_RIGHT() {
while(flag_transition_rotate == 1) {
TRANSITION_GAIT();
}
flag_transition_rotate = 2;
while(flag_shaft_reverse == 3) {
SHAFT_REVERSE();
break;
}
flag_shaft_reverse = 2;
while(flag_transition_start == 1) {
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
TRANSITION_START();
ROTATE();
}
SHAFT();
LIGHT_left = 0;
LIGHT_right = 0;
ANGLE_sweep_val = (ANGLE_sweep * -1);
ROTATE();
}
void ROTATE() {
if(ANGLE_shaft >= ANGLE_mid_Shaft && ANGLE_prev < ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, (ANGLE_mid_FLeft + ANGLE_sweep_val), ANGLE_mid_FLeft);
ANGLE_front_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, (ANGLE_mid_FRight - ANGLE_sweep_val), ANGLE_mid_FRight);
ANGLE_back_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, (ANGLE_mid_BLeft - ANGLE_sweep_val), ANGLE_mid_BLeft);
ANGLE_back_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_max_Shaft, (ANGLE_mid_BRight + ANGLE_sweep_val), ANGLE_mid_BRight);
}
else if(ANGLE_shaft >= ANGLE_mid_Shaft && ANGLE_prev > ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FLeft, (ANGLE_mid_FLeft - ANGLE_sweep_val));
ANGLE_front_right = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FRight, (ANGLE_mid_FRight + ANGLE_sweep_val));
ANGLE_back_left = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BLeft, (ANGLE_mid_BLeft + ANGLE_sweep_val));
ANGLE_back_right = map(ANGLE_shaft, ANGLE_max_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BRight, (ANGLE_mid_BRight - ANGLE_sweep_val));
}
else if(ANGLE_shaft < ANGLE_mid_Shaft && ANGLE_prev > ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, (ANGLE_mid_FLeft - ANGLE_sweep_val), ANGLE_mid_FLeft);
ANGLE_front_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, (ANGLE_mid_FRight + ANGLE_sweep_val), ANGLE_mid_FRight);
ANGLE_back_left = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, (ANGLE_mid_BLeft + ANGLE_sweep_val), ANGLE_mid_BLeft);
ANGLE_back_right = map(ANGLE_shaft, ANGLE_mid_Shaft, ANGLE_min_Shaft, (ANGLE_mid_BRight - ANGLE_sweep_val), ANGLE_mid_BRight);
}
else if(ANGLE_shaft < ANGLE_mid_Shaft && ANGLE_prev < ANGLE_shaft) {
ANGLE_front_left = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FLeft, (ANGLE_mid_FLeft + ANGLE_sweep_val));
ANGLE_front_right = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_FRight, (ANGLE_mid_FRight - ANGLE_sweep_val));
ANGLE_back_left = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BLeft, (ANGLE_mid_BLeft - ANGLE_sweep_val));
ANGLE_back_right = map(ANGLE_shaft, ANGLE_min_Shaft, ANGLE_mid_Shaft, ANGLE_mid_BRight, (ANGLE_mid_BRight + ANGLE_sweep_val));
}
SERVO_front_left.writeMicroseconds(ANGLE_front_left);
SERVO_front_right.writeMicroseconds(ANGLE_front_right);
SERVO_back_left.writeMicroseconds(ANGLE_back_left);
SERVO_back_right.writeMicroseconds(ANGLE_back_right);
}
/*==================================== END OF ROTATE ====================================*/
/*_________________________________________________________________________________________
/*##################################### END OF GAIT #####################################*/
/*================================= ULTRASONIC READING =================================*/
void SONAR_READ_ALL() {
for(SONAR_id = 0; SONAR_id < SONAR_sum; SONAR_id++) {
distance[SONAR_id] = int (SONAR_READ(SONAR_id));
}
}
float SONAR_READ(int index) {
float SONAR_distance;
digitalWrite(PIN_trig[index], HIGH);
delayMicroseconds(SONAR_TrigSig);
digitalWrite(PIN_trig[index], LOW);
float SONAR_EcInterval = float (pulseIn(PIN_ec[index], HIGH, SONAR_MaxEc));
while(SONAR_EcInterval > 0.0) {
SONAR_distance = SONAR_EcInterval * (SOUND_speed / 2.0);
break;
}
while(SONAR_EcInterval == 0.0) {
SONAR_distance = 501.0;
break;
}
return SONAR_distance;
}
/*============================= END OF ULTRASONIC READING =============================*/
/*==================================== LIGHT DETECT ====================================*/
void LIGHT_COMPARE_EXECUTE() {
//PHOTO_FLeft_RAW = analogRead(PIN_PHOTO[FRONT_LEFT]);
//PHOTO_FRight_RAW = analogRead(PIN_PHOTO[FRONT_RIGHT]);
PHOTO_Front_Left = analogRead(PIN_PHOTO[FRONT_LEFT]);
PHOTO_Front_Right = analogRead(PIN_PHOTO[FRONT_RIGHT]);
PHOTO_Back_Left = analogRead(PIN_PHOTO[BACK_LEFT]);
PHOTO_Back_Right = analogRead(PIN_PHOTO[BACK_RIGHT]);
if((PHOTO_Front_Left + PHOTO_Front_Right) >= (PHOTO_Back_Left + PHOTO_Back_Right)) {
int LIGHT_Sensitivity = 50;
if(LIGHT_COMPARE() > LIGHT_Sensitivity) {
LIGHT_left = LIGHT_COMPARE();
LIGHT_right = 0;
}
else if(LIGHT_COMPARE() < -LIGHT_Sensitivity) {
LIGHT_left = 0;
LIGHT_right = LIGHT_COMPARE();
}
else {
LIGHT_left = 0;
LIGHT_right = 0;
}
}
else {
if(PHOTO_Back_Left > PHOTO_Back_Right) {
LIGHT_right = 0;
LIGHT_left = ANGLE_turnMAX;
}
else if(PHOTO_Back_Left < PHOTO_Back_Right) {
LIGHT_right = -ANGLE_turnMAX;
LIGHT_left = 0;
}
else {
int RANDOM_back_light = random(0,2);
if(RANDOM_back_light == 0) {
LIGHT_right = 0;
LIGHT_left = ANGLE_turnMAX;
}
else if(RANDOM_back_light == 1) {
LIGHT_right = -ANGLE_turnMAX;
LIGHT_left = 0;
}
}
}
}
int LIGHT_COMPARE() {
int LIGHT_rate;
if(PHOTO_Front_Left > PHOTO_Front_Right) {
LIGHT_rate = PHOTO_Front_Left;
}
else if(PHOTO_Front_Right > PHOTO_Front_Left) {
LIGHT_rate = PHOTO_Front_Right;
}
else {
// choose to use one and comments the other of these variables bellow
// LIGHT_rate = PHOTO_Front_Left;
LIGHT_rate = PHOTO_Front_Right;
}
int LIGHT_compareRAW = PHOTO_Front_Left - PHOTO_Front_Right;
LIGHT_compareRAW = map(LIGHT_compareRAW, -LIGHT_rate, LIGHT_rate, -ANGLE_turnMAX, ANGLE_turnMAX);;
return LIGHT_compareRAW;
}
/*================================= END OF LIGHT DETECT =================================*/
/*====================================== BEHAVIOUR ======================================*/
void RETREAT_AVOID() {
counter_gait = 0;
while(counter_gait <= counter_gait_max) {
RETREAT();
}
}
void ROTATE_LEFT_AVOID() {
counter_gait = 0;
rotate_random = 2;
while(counter_gait <= counter_gait_max) {
ROTATE_LEFT();
}
}
void ROTATE_RIGHT_AVOID() {
counter_gait = 0;
rotate_random = 2;
while(counter_gait <= counter_gait_max) {
ROTATE_RIGHT();
}
}
void ROTATE_RANDOM_AVOID() {
rotate_random = ROTATE_RANDOM();
while(rotate_random == 0) {
ROTATE_LEFT_AVOID();
}
while(rotate_random == 1) {
ROTATE_RIGHT_AVOID();
}
}
void SIDE_AVOID() {
if(distance[LEFT] <= distTurn && distance[RIGHT] > distTurn) {
LIGHT_left = 0;
LIGHT_right = 0;
SONAR_left = 0;
SONAR_right = -(map(distance[LEFT], 0, distTurn, ANGLE_turnMAX, 0));
}
else if(distance[RIGHT] <= distTurn && distance[LEFT] > distTurn) {
LIGHT_left = 0;
LIGHT_right = 0;
SONAR_right = 0;
SONAR_left = map(distance[RIGHT], 0, distTurn, ANGLE_turnMAX, 0);
}
else if(distance[LEFT] <= distTurn && distance[RIGHT] <= distTurn) {
LIGHT_left = 0;
LIGHT_right = 0;
if(distance[LEFT] < distance[RIGHT]) {
SONAR_left = 0;
SONAR_right = -(map(distance[LEFT], 0, distTurn, ANGLE_turnNARROW, 0));
}
else if(distance[RIGHT] < distance[LEFT]) {
SONAR_right = 0;
SONAR_left = map(distance[RIGHT], 0, distTurn, ANGLE_turnNARROW, 0);
}
}
else {
SONAR_right = 0;
SONAR_left = 0;
}
}
/*================================== END OF BEHAVIOUR ==================================*/















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments