

Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Summary
Read moreJust a simple Theremin (first project post!) using a distance sensor and a buzzer. To make it, simply connect an ultrasonic distance sensor (I used the SR04, because it came with the starter kit I got) and a passive buzzer (not an active, passives are much better) to your board. In the picture I used a prototype shield, but that is not necessary.
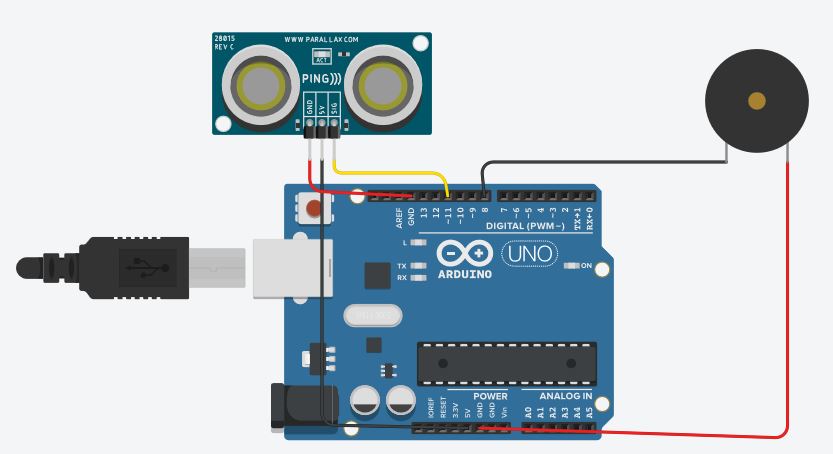
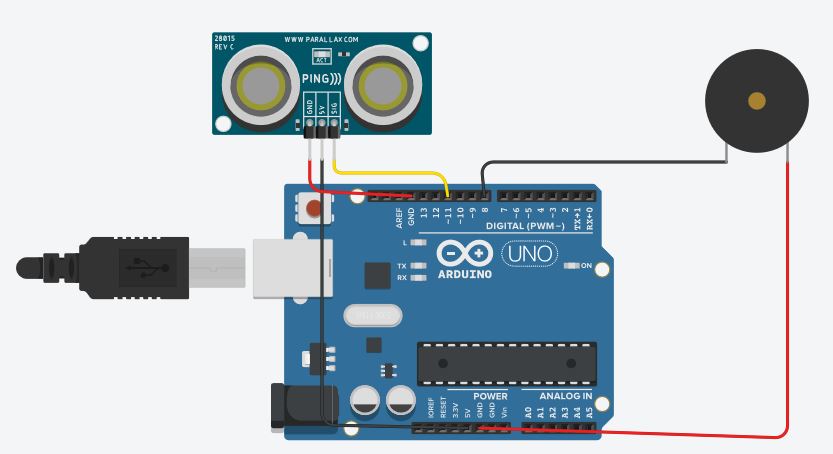
WiringDistance:
- GND to GND
- VCC to +5V
- Echo to PWM12
- Trig to PWM11
Buzzer:


_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments