Motor Speed Controller Using STM32F401CB
A motor speed controller is an important technology that is useful for regulating and maintaining motor rotation speed as needed. In its application, motor speed controllers are useful in various fields, such as robotics, machinery, and household appliances, so that work processes are more precise, safe, and in accordance with the expected specifications.
However, the design of a motor speed controller must not be taken lightly. Thorough planning and simulation are also important to ensure performance and safety when implemented in the field. Careful design, particularly in PWM settings and motor drivers, is useful for maintaining rotational stability and protecting the motor from damage due to overcurrent or improper voltage.
Simulation helps detect issues and make improvements before physical implementation. By conducting tests and calibrations in Proteus, the design process can run more smoothly and reliably, ensuring that when implemented, the motor speed controller operates according to the expected specifications.
HOW TO USE
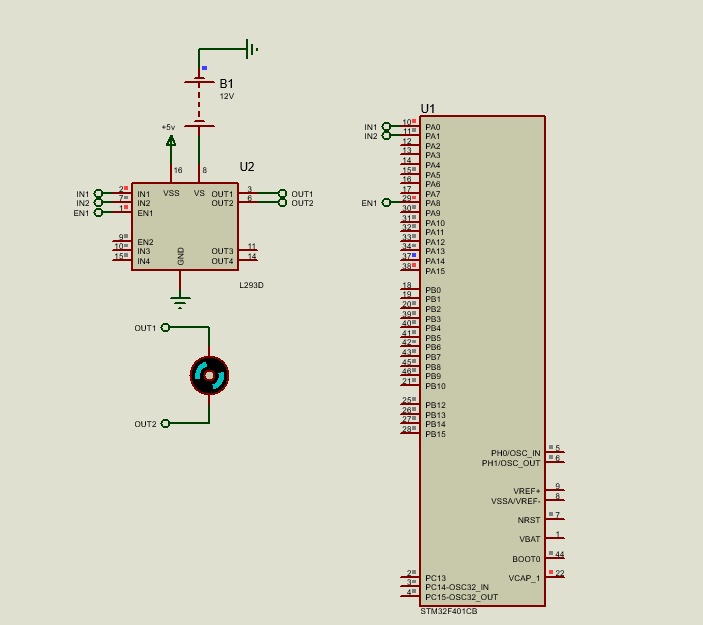
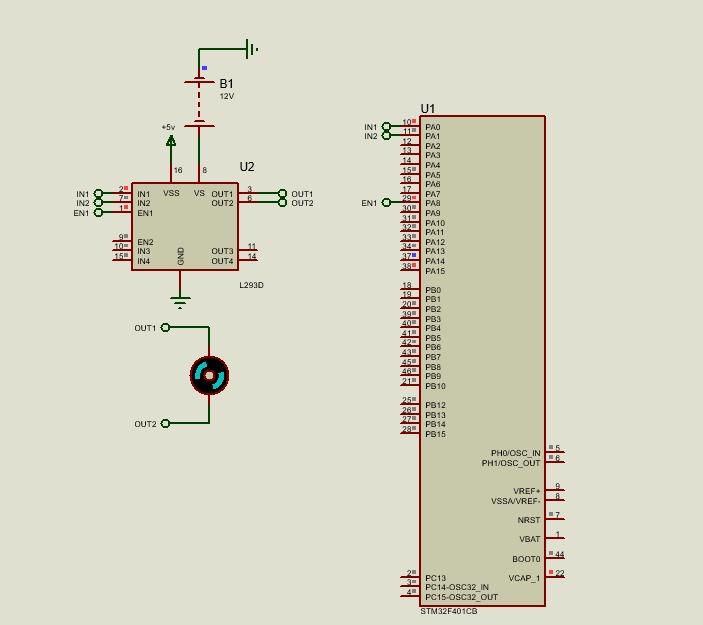
Please copy and paste the code you have into Keil µVision5. Then, open Proteus 8 Professional and assemble the circuit according to the layout shown in the diagram.
Feel free to add other components according to your creativity and needs, such as an LCD display, buttons, or sensors to further enhance its functionality.
Once the circuit is complete, connect the STM32F401CB microcontroller to the motor driver being used, then upload the program you designed.
Run the simulation to observe the response and performance of the motor speed controller as expected. By conducting thorough design and testing processes, the motor can operate more stably, precisely, and reliably.

























{kind=link}
Comments