/*
* Ultrasonic Simple
* Prints the distance read by an ultrasonic sensor in
* centimeters. They are supported to four pins ultrasound
* sensors (liek HC-SC04) and three pins (like PING)))
* and Seeed Studio sesores).
*
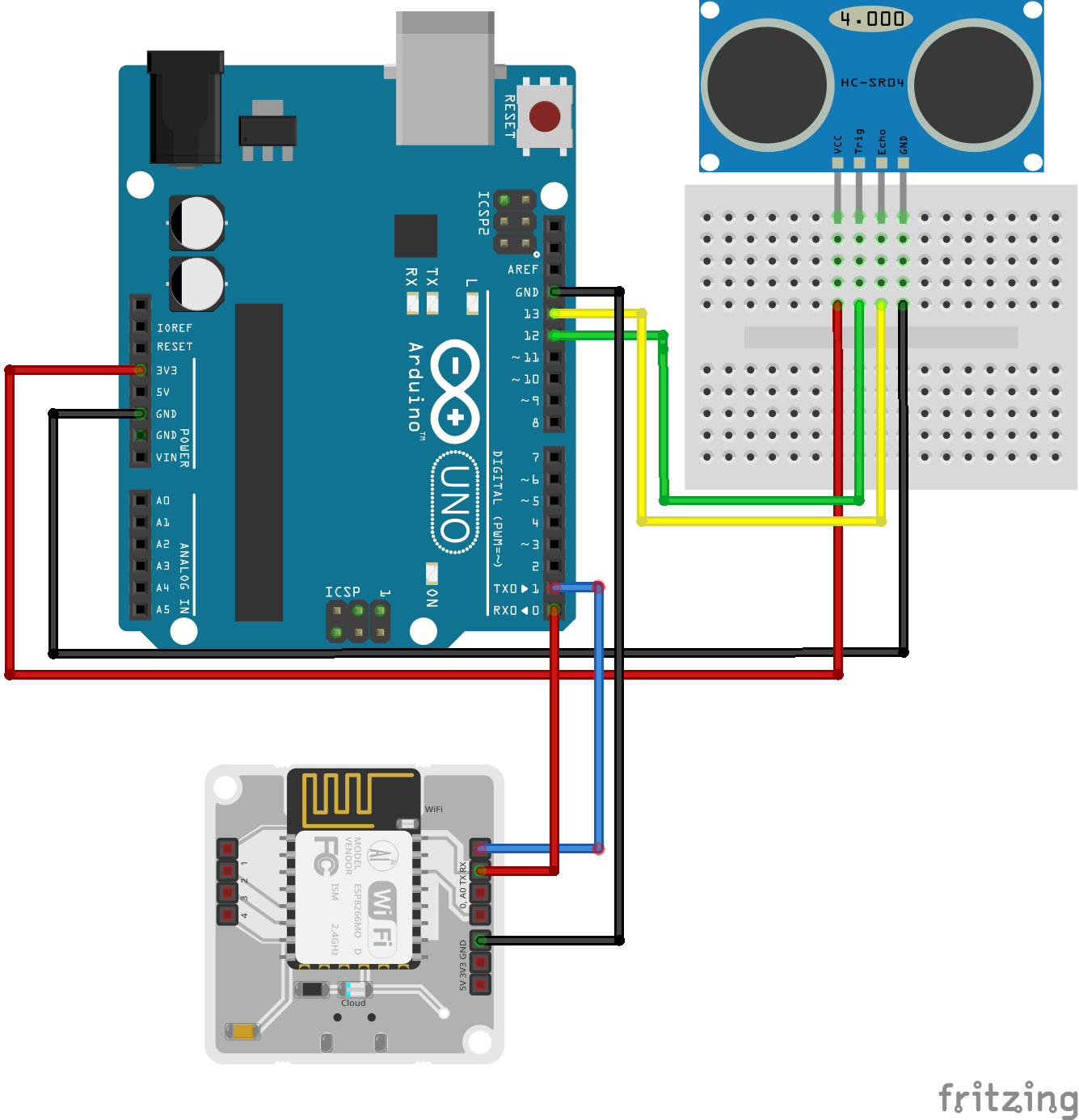
* The circuit:
* * Module HR-SC04 (four pins) or PING))) (and other with
* three pins), attached to digital pins as follows:
* --------------------- ---------------------
* | HC-SC04 | Arduino | | 3 pins | Arduino |
* --------------------- ---------------------
* | Vcc | 5V | | Vcc | 5V |
* | Trig | 12 | OR | SIG | 13 |
* | Echo | 13 | | Gnd | GND |
* | Gnd | GND | ---------------------
* ---------------------
* Note: You need not obligatorily use the pins defined above
*
* By default, the distance returned by the distanceRead()
* method is in centimeters, to get the distance in inches,
* pass INC as a parameter.
* Example: ultrasonic.distanceRead(INC)
*
* created 3 Apr 2014
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
* modified 23 Jan 2017
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
* modified 03 Mar 2017
* by Erick Simões (github: @ErickSimoes | twitter: @AloErickSimoes)
*
* This example code is released into the MIT License.
*/
#include <Ultrasonic.h>
/*
* Pass as a parameter the trigger and echo pin, respectively,
* or only the signal pin (for sensors 3 pins), like:
* Ultrasonic ultrasonic(13);
*/
Ultrasonic ultrasonic(12, 13);
void setup() {
Serial.begin(9600);
}
void loop() {
Serial.println(ultrasonic.distanceRead());
delay(1000);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





_foZqeSJxa1.png)









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
{kind=link}
{kind=link}
_foZqeSJxa1.png){kind=link}
Comments