



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
In this COVID-19 pandemic period which is a global outbreak, hand hygiene is the core preventive measure in the spread of the disease as advised by WHO (World Health Organization) which includes washing hands with water and soap regularly, hand sanitizing using hand sanitizer, etc.
Hygiene refers to the practices conducive to maintaining health and preventing disease especially through cleanliness such as washing hands, coughing in the elbow etc. Hand washing helps to prevent any diseases that spread through contact. In order to eliminate most of the germs on the hands, we need to apply a good hand washing practice. In most healthcare settings, alcohol-based hand sanitizer are preferable to hand washing with soap and water because it can be easily tolerated and it is also more effective at reducing bacteria. Hand sanitizer is a liquid, gel, or foam generally used to decrease infectious agents on the hands. A sanitizer is designed to kill germs on skin, objects and surfaces.
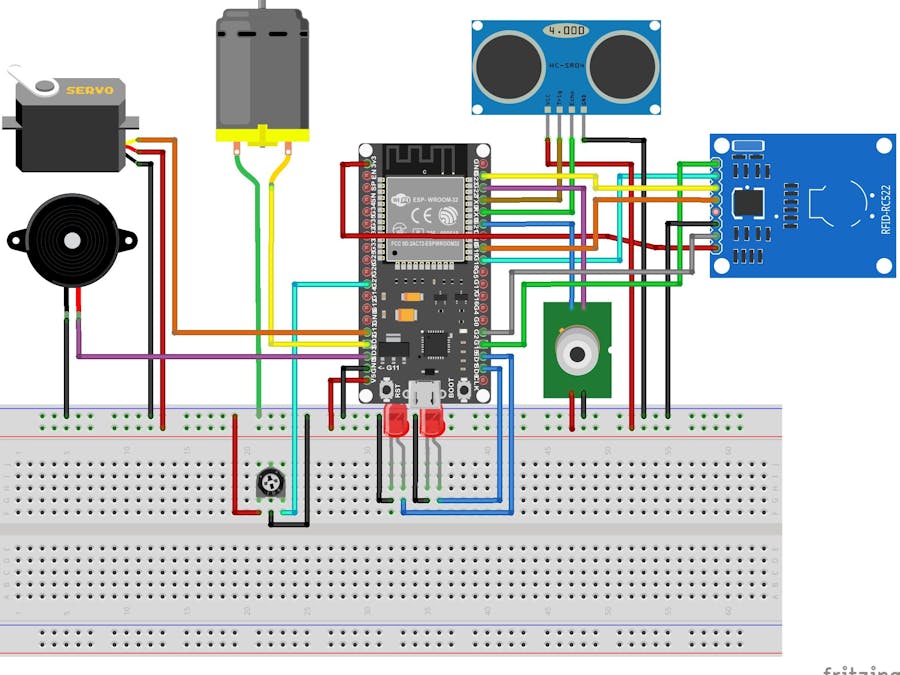
This project aim to design and make a low cost smart hand sanitizer dispenser with door controller. It is based on ESP-32 (Micro-controller), Thermal temperature sensor and Ultrasonic rangefinder sensor (an ultrasonic sensor is used to check the presence of hands below the outlet of the sanitizer machine), RFID (attendance if you are an employee) that can help to solve the challenges faced by security guards at different stations such as bank doors, school gates, hospital gates etc.
In enforcing this hand sanitizing action before letting people in to where ever they intend to enter as some people are not willing to collaborate, some look at it as a wastage of their time and sometimes security guards can let some people in without sanitizing and without check body temperature just because they are their friends or family or relatives, which is very risky. Therefore, the smart hand sanitizer is stationed at the entrance door and it is connected to the door in such a way that it controls it. That is to say, when a person(s) wants to access the entrance door, they must first sanitizer their hands or else the door will remain locked. With smart hand sanitizer dispenser, if you are employee first put Your RFID tag near RFID scanner after that put hand under smart sanitizer then the sanitizer outlet dropping some amount into your hands at that time thermal temp sensor automatically check body temperature, If temperature is normal it commands to the micro-controller to turn on the servo motor and it will open the entrance door and allow a person to enter and lighting up a green LED and in the other case if temperature is high so it will indicate RED led and beep a buzzer. Otherwise, the door will neither unlock nor open but a Both LED will continuously blink and send your Entry time, date and your Body temperature data in a sheet with all personal details. so admin will monitor all employee details through sheet.
We are also able to get attendance system in this smart hand sanitizer. So need to use that old fingerprint scanner machine and all. Just ID card will work.
With Help of This smart sanitizer no need to touch anything. So it is true to say “TOUCH LESS DO MORE”.
Inventiveness :- Sanitizing Proper hands and not touch everywhere is a must to prevent COVID-19. However, pressing the bottle nozzle, Open the door of offices, shops, factories is unhygienic. Let's avoid and go touch less with Smart Sanitizer, that will ensure that you maintain proper hygiene and health in public spaces. Many Automatic Sanitizers are available in market but it only sanitize your hands nothing else it is useful but some time we need something more.so we come with something different idea about this employee attendance using RFID and automatically check body temperature even they sanitize their hands and save the all data threw internet and admin will see and track all the data of every employee in Our Dashboard We try solve the problem so that no need to touch anything. this is different from other automatic sanitizers.
is a series of low-cost, low-power system on a chip microcontrollers with integrated Wi-Fi and dual-mode Bluetooth. The ESP32 series employs a Tensilica Xtensa LX6 microprocessor in both dual-core and single-core variations and includes built-in antenna switches, RF balun, power amplifier, low-noise receive amplifier, filters, and power-management modules. ESP32 is created and developed by Espressif Systems, a Shanghai-based Chinese company, and is manufactured by TSMC using their 40 nm process.
It is a successor to the ESP8266 microcontroller.
2. MLX90614The MLX90614 is an Infra Red thermometer for noncontact temperature measurements. Both the IR sensitive thermopile detector chip and the signal conditioning ASSP are integrated in the same TO-39 can. its low noise amplifier, 17-bit ADC and powerful DSP unit, a high accuracy and resolution of the thermometer is achieved. The thermometer comes factory calibrated with a digital PWM and SMBus (System Management Bus) output. As a standard, the 10-bit PWM is configured to continuously transmit the measured temperature in range of -20…120˚C, with an output resolution of 0.14˚C. The factory default POR setting is SMBus.
3. RC0522The RC522 is a 13.56MHz RFID module that is based on the MFRC522 controller from NXP semiconductors. The module can supports I2C, SPI and UART and normally is shipped with a RFID card and key fob. It is commonly used in attendance systems and other person/object identification applications.The RC522 is a RF Module that consists of a RFID reader, RFID card and a key chain. The module operates 13.56MHz which is industrial (ISM) band and hence can be used without any license problem. The module operates at 3.3V typically and hence commonly used in 3.3V designs. It is normally used in application where certain person/object has to be identified with a unique ID.
4. ULTRASONIC SENSORAt its core, the HC-SR04 Ultrasonic distance sensor consists of two ultrasonic transducers. The one acts as a transmitter which converts electrical signal into 40 KHz ultrasonic sound pulses. The receiver listens for the transmitted pulses. If it receives them it produces an output pulse whose width can be used to determine the distance the pulse travelled. As simple as pie!The sensor is small, easy to use in any robotics project and offers excellent non-contact range detection between 2 cm to 400 cm (that’s about an inch to 13 feet) with an accuracy of 3mm. Since it operates on 5 volts, it can be hooked directly to an Arduino or any other 5V logic microcontrollers.
5. Servo MotorA servo motor is an electrical device which can push or rotate an object with great precision. If you want to rotate and object at some specific angles or distance, then you use servo motor. It is just made up of simple motor which run through servo mechanism. If motor is used is DC powered then it is called DC servo motor, and if it is AC powered motor then it is called AC servo motor. We can get a very high torque servo motor in a small and light weight packages. Doe to these features they are being used in many applications like toy car, RC helicopters and planes, Robotics, Machine etc.
6. DC water pumpA pump is a device that moves fluids or sometimes slurries, by mechanical action, typically converted from electrical energy into Hydraulic energy. Pumps can be classified into three major groups according to the method they use to move the fluid: direct lift, displacement, and gravity pumps.Pumps operate by some mechanism (typically reciprocating or rotary), and consume energy to perform mechanical work moving the fluid. Pumps operate via many energy sources, including manual operation, electricity, engines, or wind power, and come in many sizes, from microscopic for use in medical applications, to large industrial pumps.
7. PotentiometerA potentiometer is a three-terminal resistor with a sliding or rotating contact that forms an adjustable voltage divider. If only two terminals are used, one end and the wiper, it acts as a variable resistor or rheostat.The measuring instrument called a potentiometer is essentially a voltage divider used for measuring electric potential (voltage); the component is an implementation of the same principle, hence its name.
Potentiometers are commonly used to control electrical devices such as volume controls on audio equipment
How Dashboard Looks ?Home Page :1. Create one table for user data.
2. Create second table for user temperature and it's also take data of attendance.
Status to showcase :
- Sanitizing hands is a must to prevent COVID-19. For factories, offices, hospitals, shops are Increasing concerns regarding health safety and precautionary measures for wellness. This factor is expected to drive the market growth.
- Transformation of lifestyle of individuals resulting in increased healthcare expenditure and better health measures; this factor is expected to drive the growth of the market.
- Cost-effective and Employee attendance with health record track features even with purifying capabilities associated with this product is expected to drive the market growth To facilitate smooth usage, one can adjust the volume of the spray mist/sanitizer that will be dispenses. Also, its Zero Drop design minimizes leakage and ensures high precision for disinfecting hands. It sprays the right amount of sanitizer and also becomes ready for the next person quickly within seconds. Smart Sanitizer lowers the overall cost of using sanitizer in a premise.
- It results in lower pilferage and optimized consumption. Sanitizer can be purchased in bulk and environmental wastage of disposable sanitizer bottles can also be reduced.
- At this time we target Offices, Factories, Companies employees but in the upcoming version we add the functionality for a Visitor of any Shops, hotels, Banks, hospitals etc. so this machine will work for both employee of organization and Visitor also.
- Also add employee dashboard when the employee also Monitor their data.
- The system surely help in implementing the hand hygiene without any challenges as it is a must to sanitizer if you are to access any entry point. It is much safer and more recommended due to its touch less property which zeros down any chances for cross contamination. This is a user friendly system that anyone can make use of. It can be concluded here that the system has been successfully implemented and the aim is achieved without any deviations.



Comments