Story and Concept:The Urban lifestyle has attracted humanity from its inception. The sense of community, and the overwhelming convenience of city dwelling is unmatched in any other living situation. The city is the cultural center of humanity, representing its monumental victories over the cold, deadly hands of time- so isn’t it ironic that you can’t even find a parking spot?
Parking lot overcrowding is a problem that has been plaguing the commuter since the advent of the automobile. For almost a century, breathless stockbrokers and interns alike have been frantically driving around the city, scampering to find a garage willing to offer them asylum. Unfortunately, this is a problem whose scope will only increase with time- in almost every major city in the world, urban populations are growing at a rate that existing infrastructure simply can’t support. If you think that it’s hard to get a parking spot now, just you wait until 2020! At this point in the game, the average commuter has two options, to either sit and wait for the infrastructure to catch up with the population, or to take the initiative and seek a solution. As we all know at this point, infrastructure can take ages to get built, so we think the best option is to seek a solution.
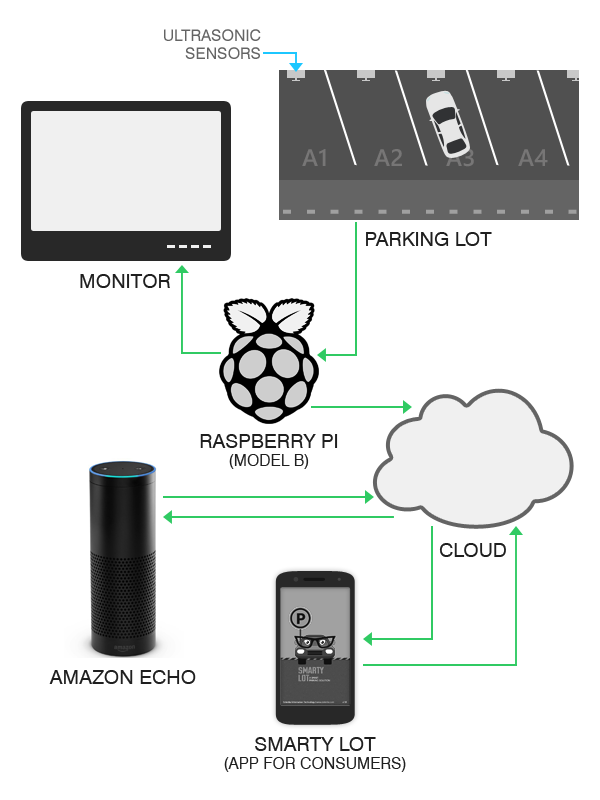
What we propose is that solution - a “Smart Parking Lot”. Essentially, what this entails is a parking lot that is connected to the internet. Through a mobile application, the commuter would be able to easily see if a certain parking spot is available or not, allowing him to plan his commute more efficiently. This is enabled by a few technologies, including Raspberry/Banana Pi, Proximity/Distance Sensors, and an App. With our application, we hope to provide a convenient, and easy-to-use solution, to a problem faced daily by a significant population of the world. People need to adapt to the every changing urban landscape, and we believe that our app could be the optimal first step to take.
How it works:The concept is simple – You download a free/paid version of an available app developed by Android/iOS developers at Extentia, that app is connected to the parking lot via a medium such as a Raspberry Pi, the parking lot has proximity sensors to detect when a vehicle has occupied a space and when the space is left vacant, this information gets fed back to the user through the reverse channel. The user can use their intuition, initially, to figure out whether 1 parking space out of a possible 10, for instance, will remain empty by the time he/she reaches the office. In addition, we can use big data analysis of the same (Since the real number of parking spots will be more than 10, obviously) to monitor the frequency of the vacancy of parking spots to later build extra features onto the app through updates. These features can include a predictive algorithm (based on the collected data, perhaps) to suggest the user a few things such as the time during which a parking spot is mostly likely to remain vacant or how likely it is for a particular parking spot (chosen by user) to remain vacant by the time they reach office.








{kind=link}
Comments