When I originally built LED bot for Let's Robot in July of 2018, I sought to make what I thought was the minimum amount of interactivity required to be considered an "interactive stream."
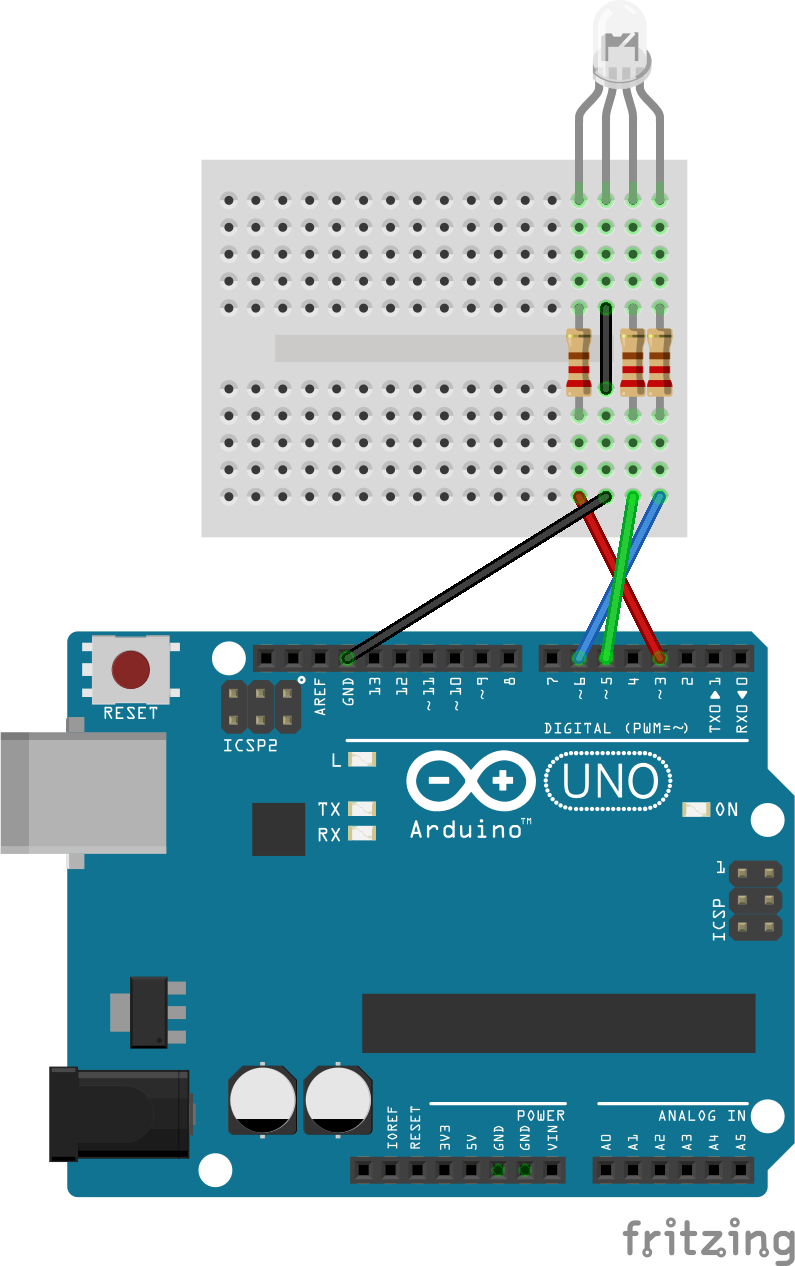
It was originally a single red LED that you can only turn on and off, controlled by the Raspberry Pi's GPIO and used a 1st generation Raspi cam. Then I got an RGB LED and knew I'd want to do color mixing so I would have to ditch the Raspberry Pi direct control, since I wanted true PWM. I eventually upgraded the camera to the C270, and was gifted a lovely backdrop by Jill, the creator of Remo. Since then, it's evolved to use Google Cloud Text to Speech Synthesis software, powered by WaveNet, plays royalty free smooth jazz, and songs about space composed by Jill.
Currently, LED bot lives on my bookshelf in my bedroom, shining bright 24/7. It serves as a tech demo for any soul browsing Remo late at night or when it's not busy.
For audio, I used an alsa loopback device.
sudo modprobe snd-aloop
sudo echo 'snd-aloop' >> /etc/modules
For the current session, the device will show up as card 1, but after a reboot it'll show up as card 0. I set my microphone device to `0, 0` and my speaker device to `0, 1`.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





{kind=link}
Comments