

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
| ||||||
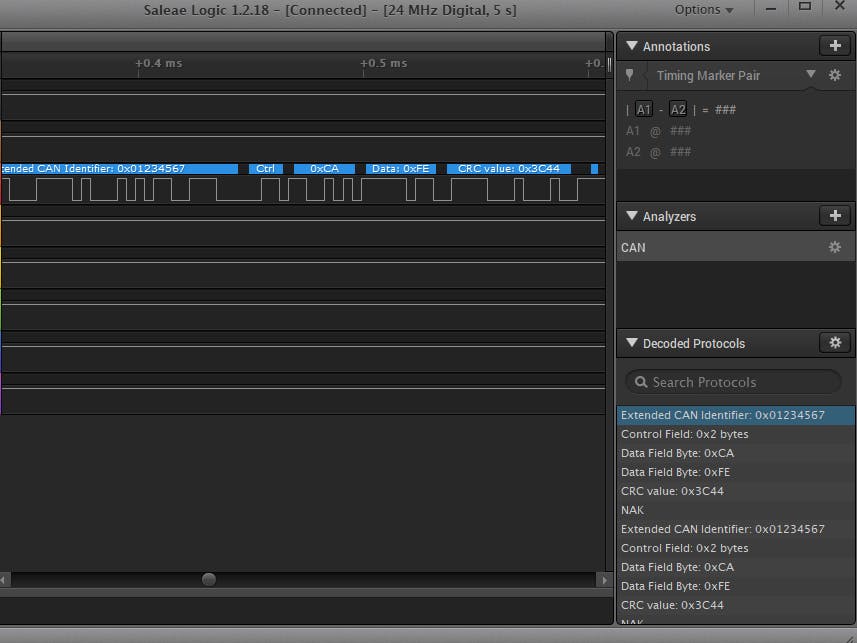
This is a simple project to show how to use nanoFramework to send and receive data over a CAN bus. On each message received, a orange led will blink!
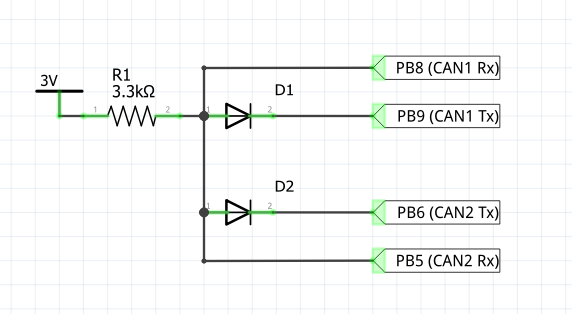
To complete this project you'll need a STM32F4Discovery evaluation board, a breadboard and a few components like resistor and diodes. A power supply of 3V is also required.



{kind=link}
Comments