


.JPG?auto=compress%2Cformat&w=900&h=675&fit=min)
Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
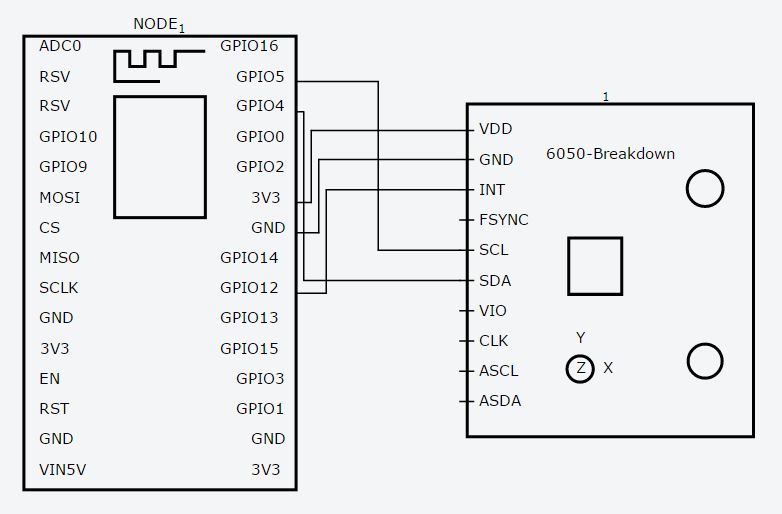
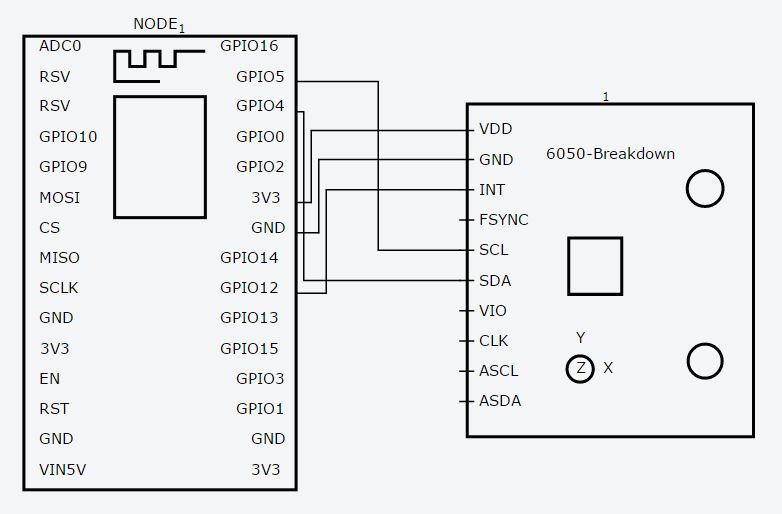
Falling down is too risky to many old man. If they are fall, we must helping them as soon as possible before any bad bad things happened. The problem is we can't always keep watch their activities.
So, in this project we will create a prototype of fall detection to solve the problem above.
This device should send an alert to your email if fall detected.



{kind=link}
Comments