//add the servo libary
#include <Servo.h>
//define our servos
Servo servo1;
Servo servo2;
//define joystick pins (Analog)
int joyX = 0;
int joyY = 1;
//variable to read the values from the analog pins
int joyVal;
void setup ()
{
//attaches our servos on pins PWM 3-5
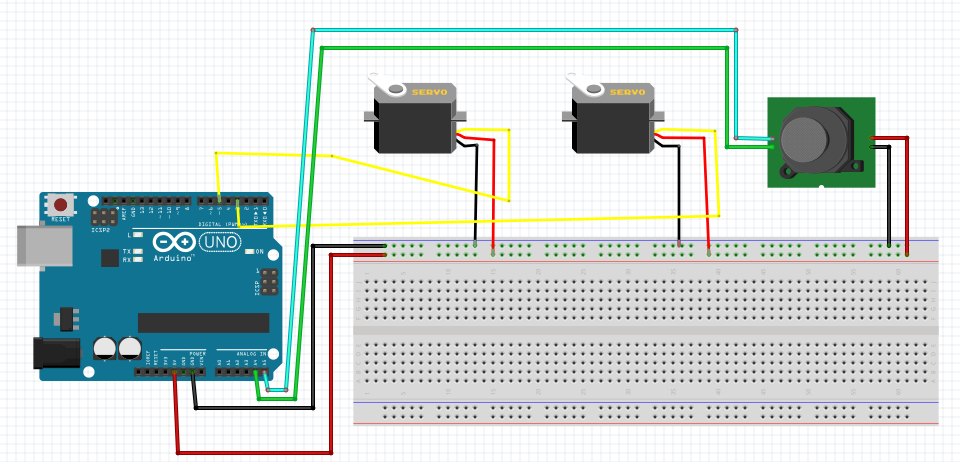
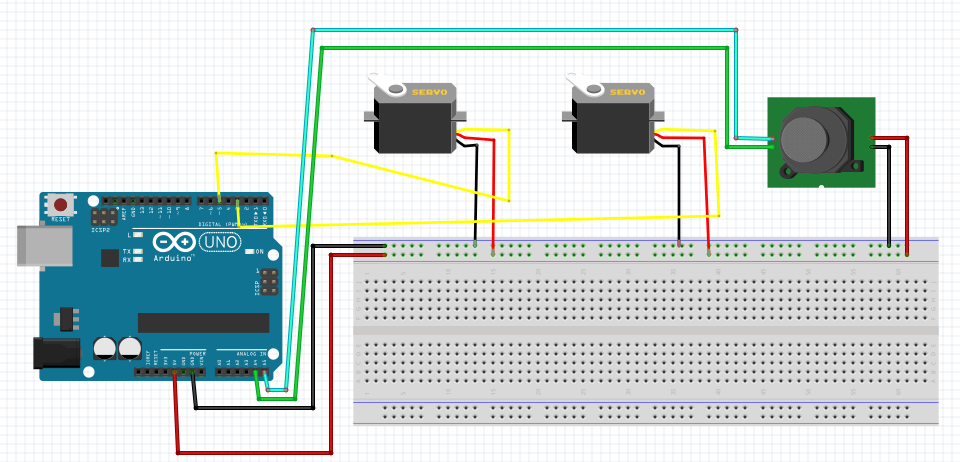
servo1.attach(3);
servo2.attach(5);
}
void loop ()
{
//read the value of joystick (betwen 0-1023)
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180); //servo value betven 0-180
servo1.write(joyVal); //set the servo position acording to the joystick value
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo2.write(joyVal);
delay(15);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

{kind=link}


Comments