

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This is a project that enables the user to control 2 Separate DC motors in either direction via Web Browser.
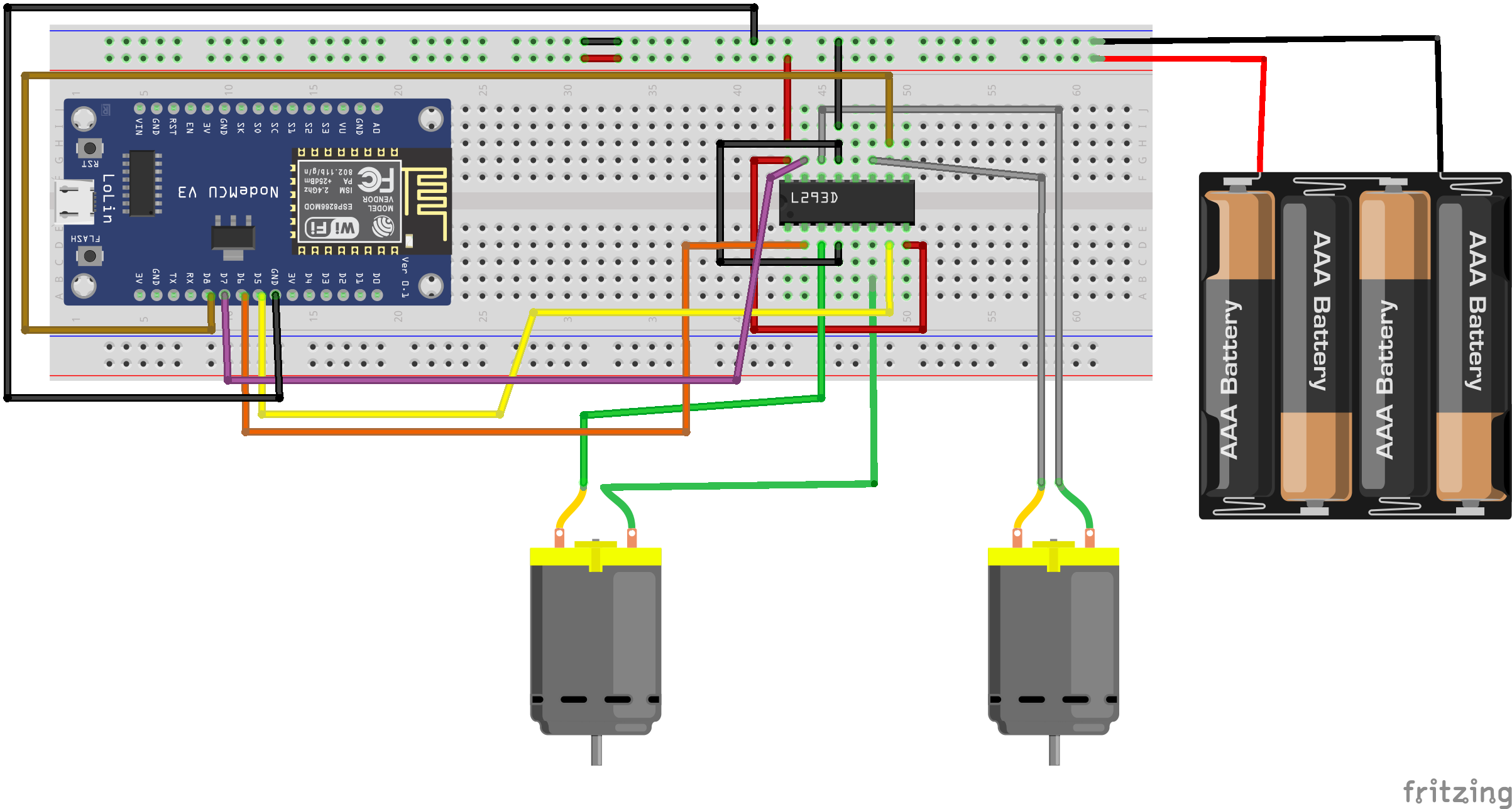
The main components used are nodeMCU, motor driver(ICL293D) and 2 DC motors.
The motor is controlled using a motor driver IC L293D and an external supply (5V) is given to the motor driver at pin 8 and 16. Pin 4 and 13 is given as the ground supply. Input to motor 1 is at pin 2 and 7 provided by pin D5 and D6 of ESP8266. Similarly for motor 2, input is provided by pin D7 and D8 to pin 10 and 15 of ICL293D.
The ESP8266 is connected to the WiFi router using an SSID and password of the WiFi router and creates a Web Server which can be accessed by the user(using a smartphone or a Laptop) connected to the Wifi router. After the connection is established, an IP address will be displayed on the Serial monitor. The user then needs to put the same IP address on the Web Browser of their device to obtain a web page.
the Web page looks like this....
Upon pressing any button the status will be displayed on the Web page showing the direction rotation of both the motors.
The status is updated automatically depending on the button pressed.
motor 1 provides status as either forward or backward.Similarly motor 2 status is either left or right.(like the motors moving in RC cars)








{kind=link}
Comments