

Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
A smart lock is arguably the most important part of a truly smart, connected home. Not only will it allow you to come and go as you please, it will also monitor who is entering and leaving your home while you’re away. Some models simply let you use your phone to open and close doors. Some let you assign special privileges to friends, family members, or maintenance staff.
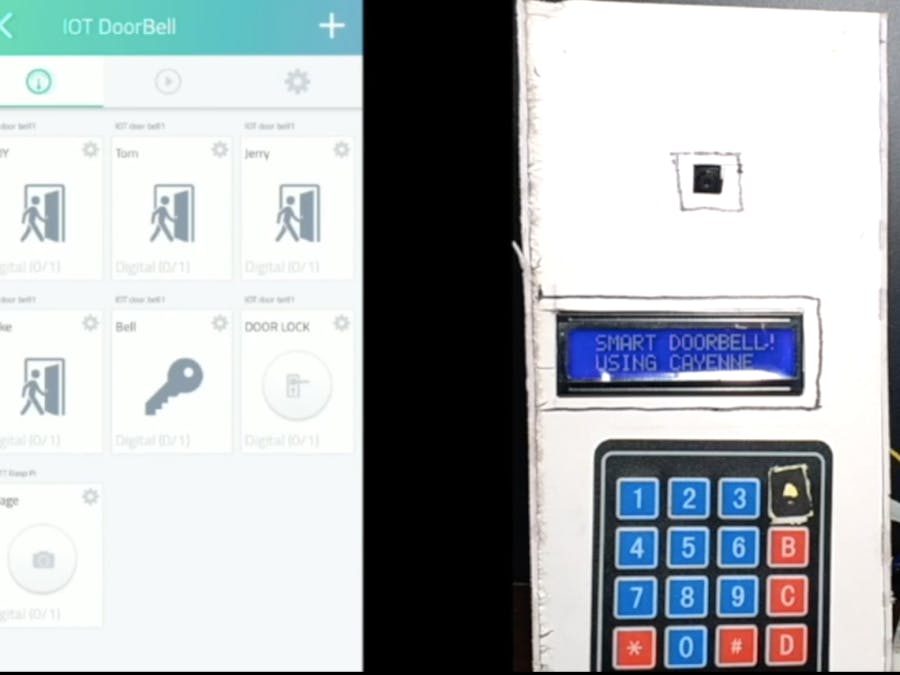
smart locks offer a mobile app that allows you to lock and unlock doors with a simple icon tap. It offers a web app that lets you control things from your desktop or laptop PC. You can add a schedule for specific days and times for the door open/close.
If the lock is Bluetooth-enabled, you’ll have to be within range (around 40 feet) to communicate with it, while with this locks built-in Wi-Fi circuitry, you can control it from almost anywhere as long as they are connected to your home router. You can go back in time to see who has entered or exited your home and when the activity took place.
Another feature is a keyless keypad for those times when you don’t have your phone or your keys. Each user of the house or company can use it unique code for entry and exit. It sends text, and email notifications that let you know who is coming and going in real-time.
A smart lock can be handy when paired with a compatible smart doorbell. If a friend, family member or service worker rings your smart doorbell while you’re away, you can visually confirm who it is via the smart doorbell, then remotely unlock the door to let them in.
http://community.mydevices.com/t/smart-lock-and-doorbell-using-cayenne/10867
ProcessCreate a new MyDevice Cayenne account: https://mydevices.com/
Connect ESP8266-01, LCD, 4x4 keypad, LED and button to Arduino Mega:
Arduino Mega||||||||ESP8266 |||| LCD ||||||||| Keypad ||||||||| Led |||||| Button
3.3v ----------------------VCC
GND----------------------GND-----------GND----------------------------- pin2---------- -
19--------------------------Tx
18--------------------------Rx
5v ------------------------------------------VCC
30 ------------------------------------------rs
32 ------------------------------------------en
22 ------------------------------------------d4
24 ------------------------------------------d5
26 ------------------------------------------d6
28 ------------------------------------------d7
2 ---------------------------------------------------------Rowpin1
3 ---------------------------------------------------------Rowpin2
4 ---------------------------------------------------------Rowpin3
5 ---------------------------------------------------------Rowpin4
6 ---------------------------------------------------------Columnpin1
7 ---------------------------------------------------------Columnpin2
9 ---------------------------------------------------------Columnpin3
10---------------------------------------------------------Columnpin4
11-------------------------------------------------------------------------------------pin1
13 -------------------------------------------------------------------------------------------------- + with 470ohm resistor
Add a new Arduio device to your cayenne dashboard. Edit the arduino code and add your Wi-Fi credentials (ssid, password) and MQTT credential. Upload the code into you Arduino Mega.
Add 5 two states widget to your cayenne dashboard with channel 1 - 5.
A button widget with channel 6 is used to control door lock and unlock.
Install Cayenne MQTT python library https://github.com/myDevicesIoT/Cayenne-MQTT-Python and follow the procedure to add a new device on cayenne using raspberry pi.
Add the Raspberry Pi code and run it.
Create a button widget on Cayenne dashboard for capturing image on Raspberry Pi.
Triggers & AlertsThere is one main trigger used between Raspberry Pi and Arduino Mega.
If doorbell (A) is pressed on the 4x4 keypad it makes the Bell two state widget 1 which trigger the image button on Raspberry Pi to turn ON. This runs the script on Pi to click a pic of the visitor and send it through an email.
When the image button turns on, it sends an alert, notifying that a visitor has arrived and to check the email for visitor's pic.
Each user two state widget has an entry alert which sends an SMS, notifying that a user has entered the house.







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments