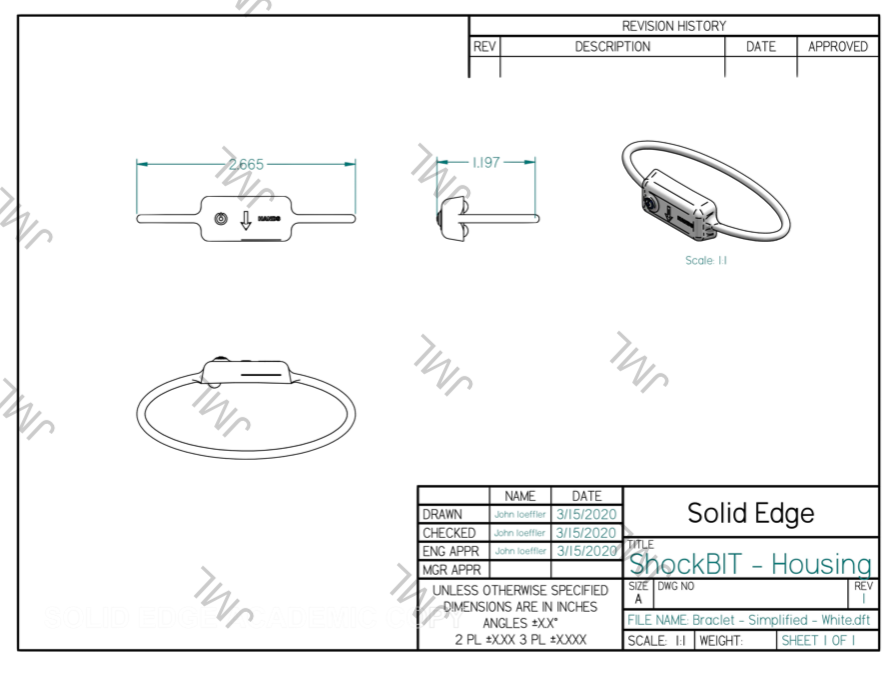
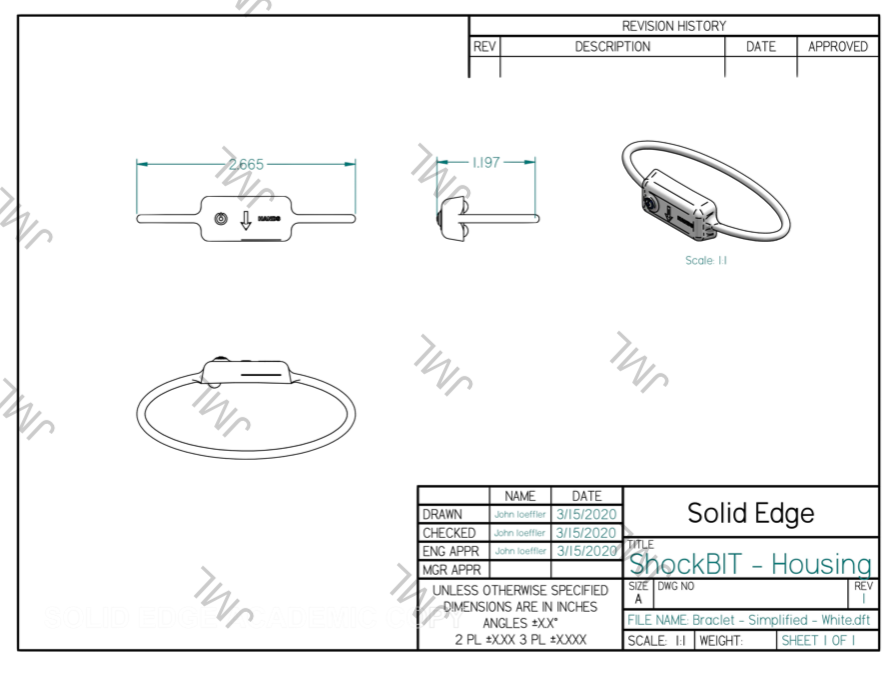
ShockBIT is (2) small disposable electronic devices that attaches to a users wrists and will monitor hand motion and when the hand position is close to face (Above the shoulders) will emit a small, harmless electrical pulses or light vibration (no more than 1 Second) to that wrist. This electrical pulse is intended to silently alert user that their hands are in close proximity to the face. ShockBIT is design for easy to use user experience to lightly remind users to refrain from unnecessarily touching their mouth, nose, and eyes. ShockBIT is Based off of an Arduino Pro Mini running at 3.3V.
1 / 2
• What is ShockBIT:
ShockBIT consists of a Silicone band with a pocket that houses the electronic components. The Electronics are a simple Microcontroller, Coin cell Battery, Button, low power Accelerometer do detect an inversion of the board, and a Boost controller with Copper Electrodes to make contact with the users skin.
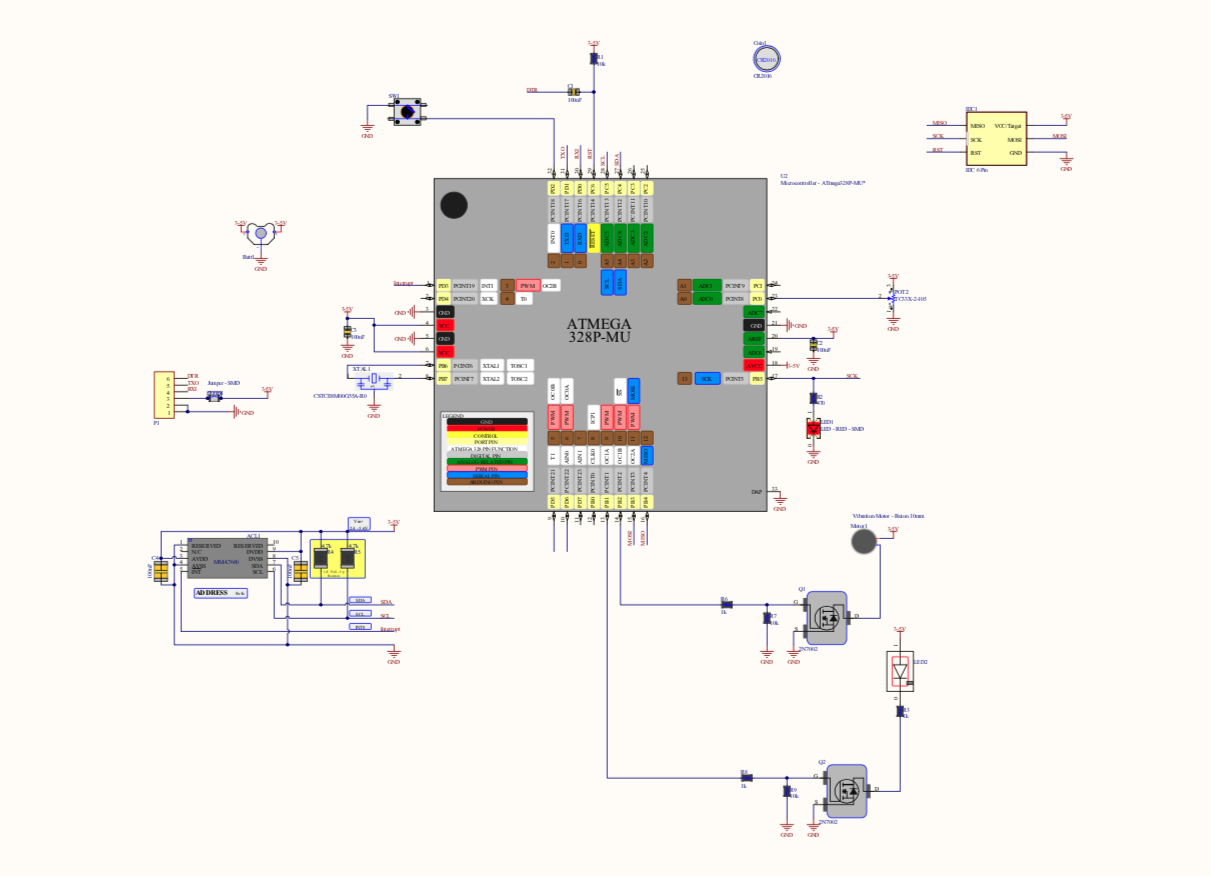
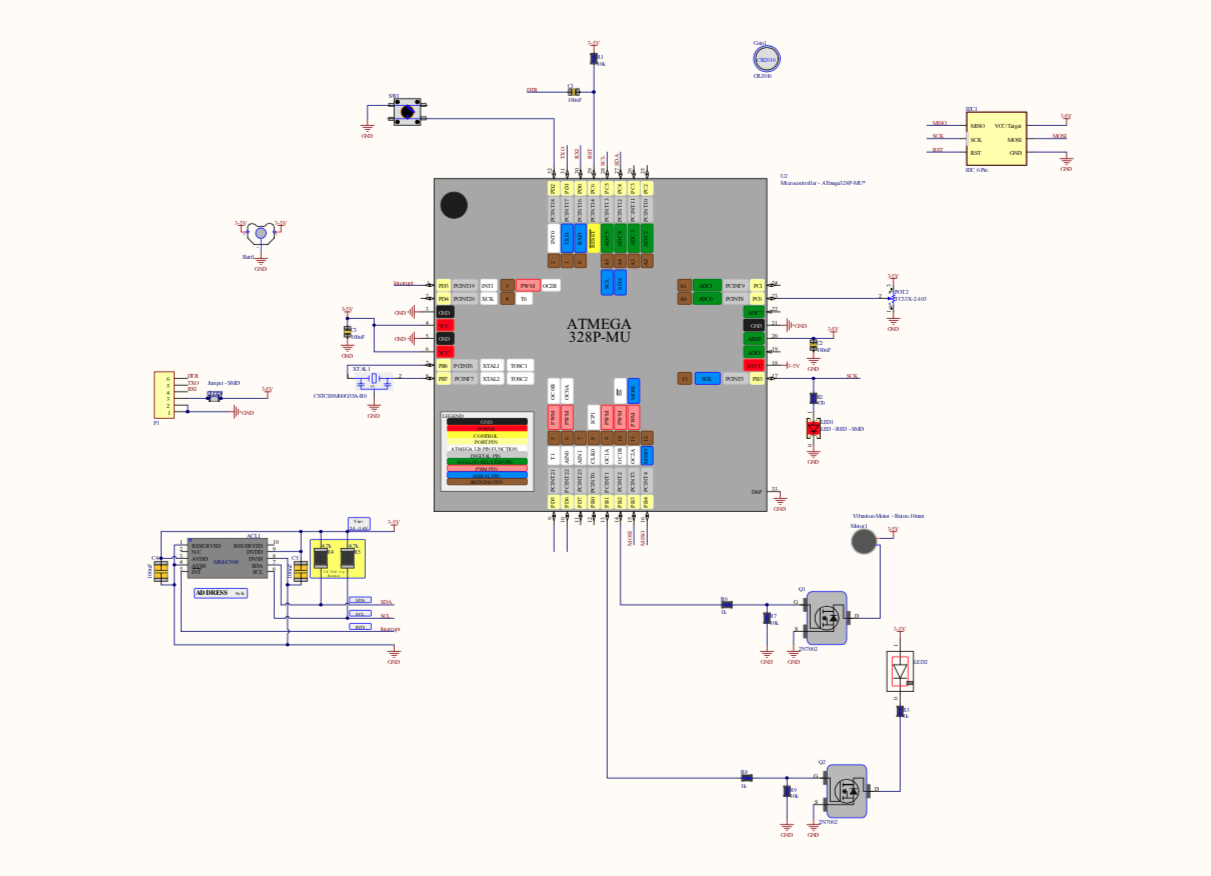
Current Prototype
Using a Moving average filter to remove noise
Rev 4 Version using a small vibrating motor to aleart. LED is for debuging
Shockbit will not alert under normal user activities.
BOM
The Bill of Material for the Prototype is $3.09 as is in low quntity
With Further Development the Bill of Material can be significantly reduced to a component cost of $0.75
Battery Life
ShockBIT has a minimum battery life of 5.8 Days assuming heavy usage and a storage battery life of over 1 year
Time Line - Our estimated Delivery Date in large quantity will be approximately early September before the start of the annual flu season
// Distributed with a free-will license.
// Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
// MMA7660FC
// This code is designed to work with the MMA7660FC_I2CS I2C Mini Module available from ControlEverything.com.
// https://www.controleverything.com/content/Accelorometer?sku=MMA7660FC_I2CS#tabs-0-product_tabset-2
#include <Wire.h>#define Addr 0x4C // MMA7660FC I2C address is 0x4C(76) //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
int Accl_int=3;volatile byte state= LOW;int Accel_Interrupt=0; //--------- -------- -------- -------- --------- -------- -------- ---------------- -------- -------- --------
//--------- -------- -------- -------- Button INTTERUPT CODE -------- -------- -------- --------
int Button_int=2;int Button_Interrupt=0; //--------- -------- -------- -------- --------- -------- -------- ---------------- -------- -------- --------
int Accel_Thresh= -10;const int numReadings=10;int readings_x[numReadings]; // the readings from the analog input
int readIndex_x=0; // the index of the current reading
float total_x=0.00; // the running total
float average_x=0.00; // the average
int readings_y[numReadings]; // the readings from the analog input
int readIndex_y=0; // the index of the current reading
float total_y=0.00; // the running total
float average_y=0.00; // the average
int readings_z[numReadings]; // the readings from the analog input
int readIndex_z=0; // the index of the current reading
float total_z=0.00; // the running total
float average_z=0.00; // the average
int up_lim=35;int low_lim= -35;int RED_Led=9; //High Brightness led
int green_Led=13; //indicator led Brightness led
int Vibration_Motor=10; //indicator led Brightness led
void setup(){pinMode(green_Led, OUTPUT);pinMode(RED_Led, OUTPUT);pinMode(Vibration_Motor, OUTPUT); //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
pinMode(Accl_int, INPUT);pinMode(Accl_int, INPUT_PULLUP);attachInterrupt(digitalPinToInterrupt(Accl_int), blink, FALLING); //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
//--------- -------- -------- -------- Button INTTERUPT CODE -------- -------- -------- --------
pinMode(Button_int, INPUT);pinMode(Button_int, INPUT_PULLUP);attachInterrupt(digitalPinToInterrupt(Button_int), button, FALLING); //--------- -------- -------- -------- --------- -------- -------- ---------------- -------- -------- --------
for(int thisReading_x=0; thisReading_x < numReadings; thisReading_x++){ readings_x[thisReading_x]=0;}for(int thisReading_y=0; thisReading_y < numReadings; thisReading_y++){ readings_y[thisReading_y]=0;}for(int thisReading_z=0; thisReading_z < numReadings; thisReading_z++){ readings_z[thisReading_z]=0;} Wire.begin(); // Initialise I2C communication as MASTER
Serial.begin(38400); // Initialise Serial Communication, set baud rate=9600 //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
Wire.beginTransmission(0x4c); // Setting up Interrupts
Wire.write(0x06); Wire.write(0b00000011); // Position Change (0x4E (0b10011100) - TAP Detection) Wire.endTransmission(); delay(2); Wire.beginTransmission(0x4c); // Setting up Tap Threshold
Wire.write(0x09); Wire.write(0b0000001); Wire.endTransmission(); delay(2); Wire.beginTransmission(0x4c); // Setting up MODE to Active with Interrups
Wire.write(0x07); Wire.write(0b1100001); Wire.endTransmission(); //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
Wire.beginTransmission(Addr); // Start I2C Transmission
Wire.write(0x07); // Select mode register
Wire.write(0x01); // Select active mode ******MUST Upload 0x00 then umpload 0x01 when changing Samples
Wire.endTransmission(); // Stop I2C Transmission
delay(100); Wire.beginTransmission(Addr); // Start I2C Transmission
Wire.write(0x08); // Select sample rate register register
Wire.write(0X02); // 120 sample per second
Wire.endTransmission(); // Stop I2C Transmission
delay(100); digitalWrite(green_Led, LOW); digitalWrite(RED_Led, LOW); digitalWrite(Vibration_Motor, LOW);}void loop(){ //------------------------------------ Accelerometr Data Aquire ----------------------------------------
int Pot_read= analogRead(A0); int Pot_Mapped= map(Pot_read, 0, 1023, 0, 100); unsigned int data[3]; Wire.beginTransmission(Addr); // Start I2C Transmission
Wire.write(0x00); // Select Data Register
Wire.endTransmission(); // Stop I2C Transmission
Wire.requestFrom(Addr, 3); // Request 3 bytes of data
if(Wire.available()==3) // Read the three bytes // xAccl, yAccl, zAccl
{ data[0]= Wire.read(); data[1]= Wire.read(); data[2]= Wire.read();} //------------------------------------ +- Orientation ----------------------------------------
int xAccl= data[0]& 0x3F;if(xAccl > 31){ xAccl -=64;} int yAccl= data[1]& 0x3F;if(yAccl > 31){ yAccl -=64;} int zAccl= data[2]& 0x3F;if(zAccl > 31){ zAccl -=64;} //------------------------------------ SMOOTHING X----------------------------------------
total_x= total_x - readings_x[readIndex_x]; // subtract the last reading:
readings_x[readIndex_x]= xAccl; // read from the sensor:
total_x= total_x + readings_x[readIndex_x]; // add the reading to the total:
readIndex_x= readIndex_x + 1; // advance to the next position in the array:
if(readIndex_x >= numReadings) // if we're at the end of the array... { readIndex_x = 0; } // ...wrap around to the beginning: average_x = total_x / numReadings; // calculate the average: //------------------------------------ SMOOTHING Y---------------------------------------- total_y = total_y - readings_y[readIndex_y]; // subtract the last reading: readings_y[readIndex_y] = yAccl; // read from the sensor: total_y = total_y + readings_y[readIndex_y]; // add the reading to the total: readIndex_y = readIndex_y + 1; // advance to the next position in the array: if (readIndex_y >= numReadings) // if we're at the end of the array...
{readIndex_y=0;} // ...wrap around to the beginning:
average_y= total_y / numReadings; // calculate the average:
//------------------------------------ SMOOTHING Z----------------------------------------
total_z= total_z - readings_z[readIndex_z]; // subtract the last reading:
readings_z[readIndex_z]= zAccl; // read from the sensor:
total_z= total_z + readings_z[readIndex_z]; // add the reading to the total:
readIndex_z= readIndex_z + 1; // advance to the next position in the array:
if(readIndex_z >= numReadings) // if we're at the end of the array...
{readIndex_z=0;} // ...wrap around to the beginning:
average_z= total_z / numReadings; // calculate the average:
//-----------------------------------------------------------------------------------------------
// if(Serial.available() > 0) // { Serial.print(" "); Serial.print(Pot_Mapped); Serial.print(" "); Serial.print(low_lim); Serial.print(" "); Serial.print(up_lim); Serial.print(" "); Serial.print(average_x); // send it to the computer as ASCII digits
Serial.print(" "); Serial.print(average_y); // send it to the computer as ASCII digits
Serial.print(" "); Serial.print(average_z); // send it to the computer as ASCII digits
Serial.print(" "); Serial.print(Button_Interrupt); Serial.print(" "); Serial.println(Accel_Interrupt);// }if(average_x <= Accel_Thresh){ digitalWrite(RED_Led, HIGH); digitalWrite(Vibration_Motor, HIGH);}else{ digitalWrite(RED_Led, LOW); digitalWrite(Vibration_Motor, LOW);} //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
Accel_Interrupt=0;Button_Interrupt=0; //--------- -------- -------- -------- ACCELEROMETER INTTERUPT CODE -------- -------- -------- --------
delay(1);}//--------------------------------------------------------------------------------------
void blink(){for(int i=0; i <=1; i++){ digitalWrite(green_Led, HIGH); delay(2); digitalWrite(green_Led, LOW); delay(5);}Accel_Interrupt=20;}void button(){for(int i=0; i <=1; i++){ digitalWrite(RED_Led, HIGH); digitalWrite(Vibration_Motor, HIGH); delay(100); digitalWrite(RED_Led, LOW); digitalWrite(Vibration_Motor, LOW); delay(100);}Button_Interrupt= -40;}








_copy_k1AENyZ0Iw.jpg)






_copy_k1AENyZ0Iw.jpg){kind=link}
{kind=link}
{kind=link}
Comments