import pylab as pl
import numpy
import cv2
import RPi.GPIO as GPIO
import time
from matplotlib import collections as mc
import math
from Adafruit_IO import Client
aio = Client('2847f3e0b36f4f308a5582fdc58211ab')
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
TRIG = 23
ECHO = 24
q=0
GPIO.setup(12,GPIO.OUT)
GPIO.setup(16,GPIO.OUT)
GPIO.setup(TRIG,GPIO.OUT)
GPIO.setup(ECHO,GPIO.IN)
GPIO.setup(25,GPIO.OUT)
pwm=GPIO.PWM(25,50)
pwm.start(5)
DutyCycle = 1/18* (q) + 2
pwm.ChangeDutyCycle(DutyCycle)
lines = [[(0, 1), (3, 3)], [(0, 1), (7, 9)], [(0, 1), (8, 7)]]
for i in range (0, 36):
GPIO.output(TRIG, False)
print ("Waitng For Sensor To Settle")
time.sleep(1)
print ("Distance measurement in progress")
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
while GPIO.input(ECHO)==0:
pulse_start = time.time()
while GPIO.input(ECHO)==1:
pulse_end = time.time()
pulse_duration = pulse_end - pulse_start
distance = pulse_duration * 17150
distance = round(distance, 2)
if distance > 2 and distance < 400:
print ("Distance:",distance - 0.5,"cm")
else:
print ("Out Of Range")
a=math.cos(math.radians(q))*distance
b=math.sin(math.radians(q))*distance
q=q+.8
if (q>180):
q=0
lines.append([(0, 1),(a,b)])
c = [1, 0, 0, 1]
i=i+1
print(lines)
aio.send('line segment', lines)
lc = mc.LineCollection(lines, colors=c, linewidths=0.5)
fig, ax = pl.subplots()
ax.add_collection(lc)
ax.autoscale()
ax.margins(0.1)
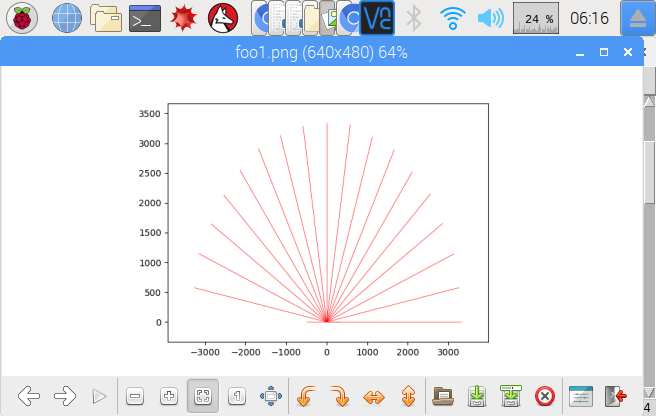
fig.savefig('foo1.png')
time.sleep(1)
r=cv2.imread('foo1.png')
cv2.imshow('Mapped image',r)
Attachments











{kind=link}
Comments