



Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
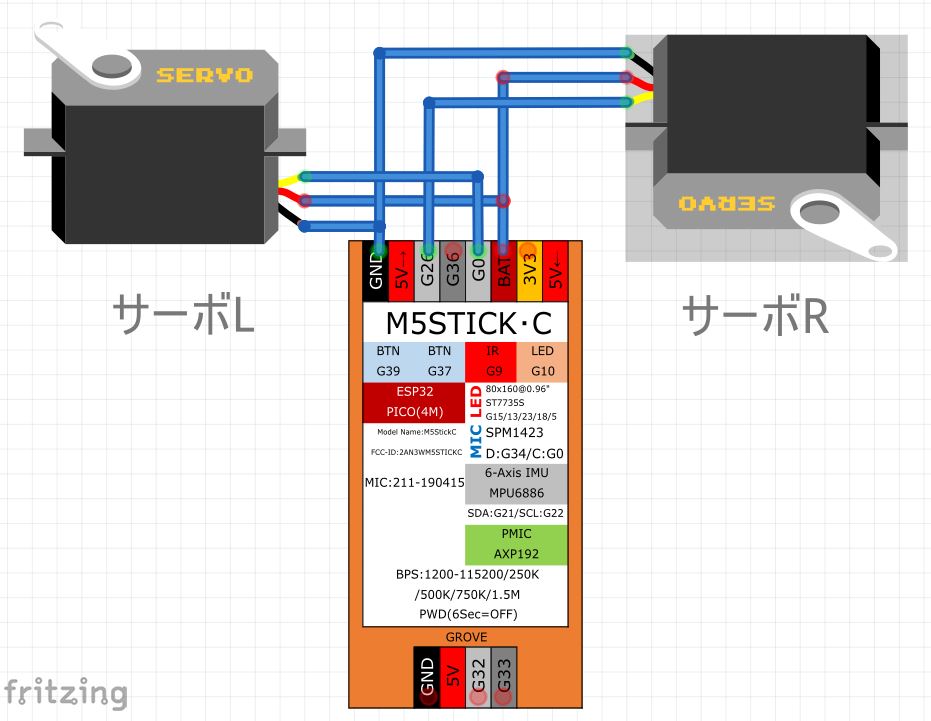
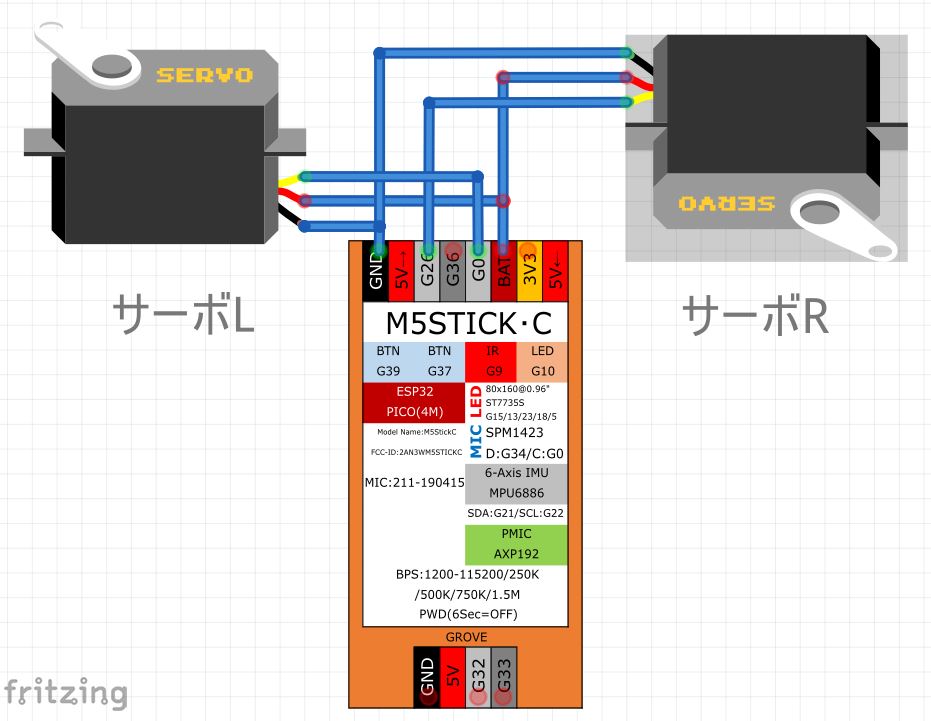
This is a simple inverted pendulum robot using M5StickC and servo motor...
This DIY robot is designed for anyone to build easily and explore control system learning.Most self-balancing robots are either pricey or tricky to assemble—but not this one.It runs on just an M5StickC Plus and a servo, keeping costs low and complexity minimal.No extra circuits, no sensors, and no tools needed—just snap it together and start
https://x.com/shinichi_nino/status/1958176338231304412
https://x.com/shinichi_nino/status/1959258219441733651
experimenting.https://x.com/shinichi_nino/status/1952392487357870398
Check out the blog below for a step-by-step guide.
https://n-shinichi.hatenablog.com/
#M5StackInnovationContest
{kind=link}

Comments