//*******************************************
//
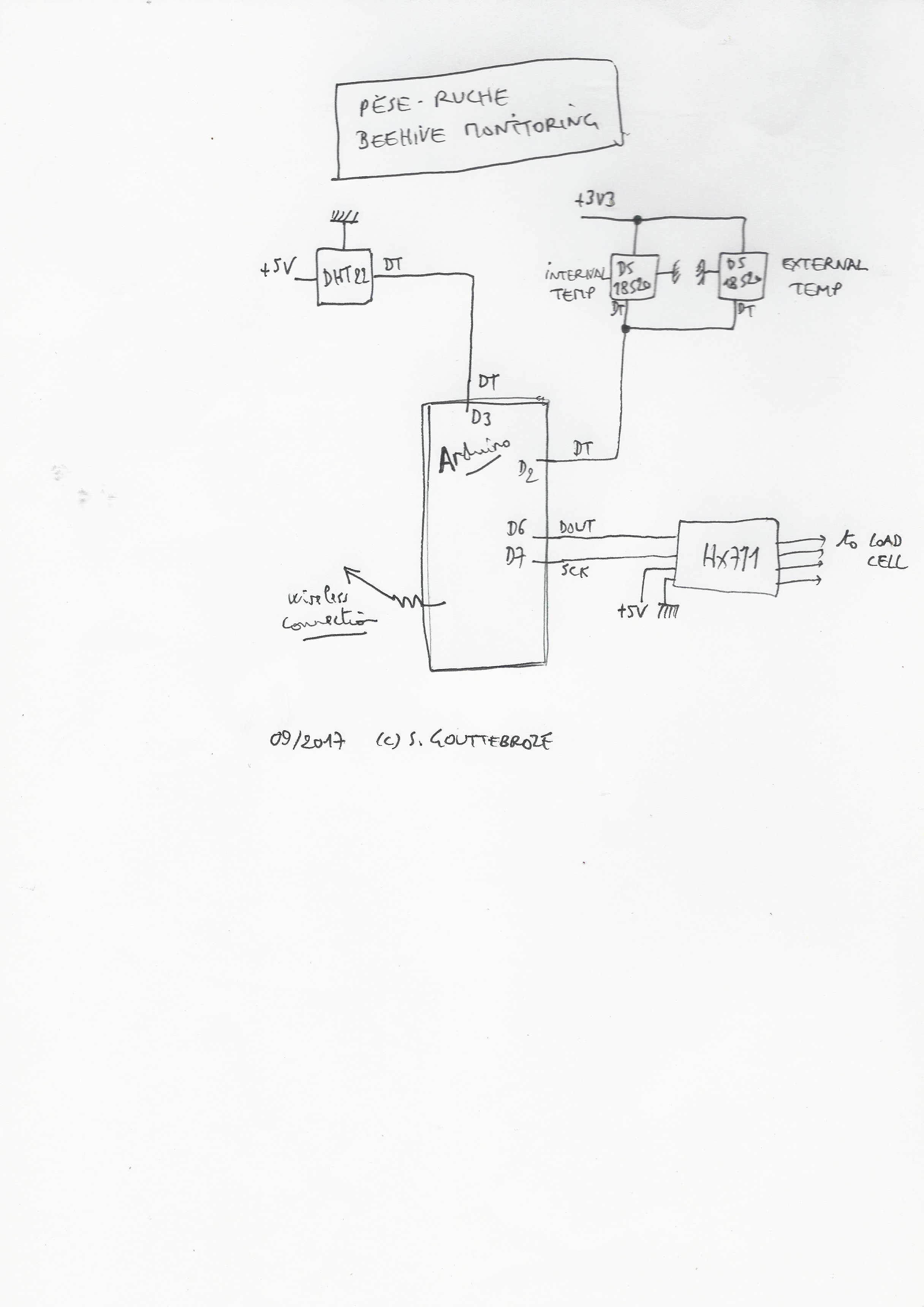
// Systme eruche installe au Joug
//
// S.GOUTTEBROZE (c) 01.2017
//*******************************************
#include "HX711.h"
#include <OneWire.h>
#include <DHT.h>;
//Constants
#define DHTPIN 4 // what pin we're connected to = D2
#define DHTTYPE DHT22 // DHT 22 (AM2302)
DHT dht(DHTPIN, DHTTYPE); //// Initialize DHT sensor for normal 16mhz Arduino
// DS18S20 Temperature chip i/o
OneWire ds(2); // on pin 4
//Variables
int chk,cpt;
float hum; //Stores humidity value
float temp; //Stores temperature value
// the setup function runs once when you press reset or power the board
unsigned long Weight = 0;
unsigned long AverageWeight = 0;
unsigned long AverageWeightot = 0;
unsigned long AverageWeightold = 0;
int ini(0);
int Clock = 7; //3 on board
int Dout = 6; //2 on board
float poidsD(0);
float Tc_100_A,Tc_100_B;
byte i;
byte type_s;
byte present = 0;
byte data[12];
byte addr[8];
char *msg ;
void lire_scaleD() {
//Serial.println("Lire D...");
// wait for the chip to become ready
while (digitalRead(Dout) == HIGH);
AverageWeight = 0;
for (char j = 0; j<100; j++)
{
Weight =0;
// pulse the clock pin 24 times to read the data
for (char i = 0; i<24; i++)
{
digitalWrite(Clock, HIGH);
delayMicroseconds(2);
Weight = Weight <<1;
if (digitalRead(Dout)==HIGH) Weight++;
digitalWrite(Clock, LOW);
}
// set the channel and the gain factor (A 128) for the next reading using the clock pin (one pulse)
digitalWrite(Clock, HIGH);
Weight = Weight ^ 0x800000;
digitalWrite(Clock, LOW);
AverageWeight += Weight;
delayMicroseconds(60);
}
AverageWeight = AverageWeight/100;
//Serial.print("PoidsDnew=");
//Serial.println(AverageWeight);
}
void setup() {
Serial.begin(9600);
//intialize HX711 "Module 4" SCALE D
pinMode(Clock, OUTPUT); // initialize digital pin 4 as an output.(clock)
digitalWrite(Clock, HIGH);
delayMicroseconds(100); //be sure to go into sleep mode if > 60s
digitalWrite(Clock, LOW); //exit sleep mode*/
pinMode(Dout, INPUT); // initialize digital pin 5 as an input.(data Out)
dht.begin();
Serial.println("ready");
ini=1;
// Initialisation...
lire_scaleD();
//poidsD=AverageWeight*0.8774529-7360044.76;
//Serial.println(poidsD);
}
void loop() {
// Pour les tests sans Bluetooth,
lecture_data();
envoi_msg();
// Pause entre 2mesures...
delay(3000);
delay(1000);
// pour 10secondes de dlai
delay(20000);
// on ajoute 20sec
delay(90054);
// on ajoute 90sec --> lecture toutes les 2min
delay(3000); // ajustement pour atteindre 2min
delay(500);
}
void lecture_data() {
//Serial.println("Loop Readings:...");
// Temperature #A capteur interne boitier
ds.reset();
addr[0]=16;
addr[1]=71;
addr[2]=193;
addr[3]=37;
addr[4]=1;
addr[5]=8;
addr[6]=0;
addr[7]=200;
// the first ROM byte indicates which chip
switch (addr[0]) {
case 0x10:
//Serial.println(" Chip = DS18S20"); // or old DS1820
type_s = 1;
break;
case 0x28:
//Serial.println(" Chip = DS18B20");
type_s = 0;
break;
case 0x22:
//Serial.println(" Chip = DS1822");
type_s = 0;
break;
default:
Serial.println("Device is not a DS18x20 family device.");
return;
}
ds.select(addr);
ds.write(0x44, 1); // start conversion, with parasite power on at the end
delay(1000); // maybe 750ms is enough, maybe not
// we might do a ds.depower() here, but the reset will take care of it.
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
}
// Convert the data to actual temperature
// because the result is a 16 bit signed integer, it should
// be stored to an "int16_t" type, which is always 16 bits
// even when compiled on a 32 bit processor.
int16_t raw = (data[1] << 8) | data[0];
if (type_s) {
raw = raw << 3; // 9 bit resolution default
if (data[7] == 0x10) {
// "count remain" gives full 12 bit resolution
raw = (raw & 0xFFF0) + 12 - data[6];
}
} else {
byte cfg = (data[4] & 0x60);
// at lower res, the low bits are undefined, so let's zero them
if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms
else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms
else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms
//// default is 12 bit resolution, 750 ms conversion time
}
Tc_100_A = (float)raw / 16.0;
// Temperature #B capteur volant
ds.reset();
addr[0]=16;
addr[1]=228;
addr[2]=224;
addr[3]=37;
addr[4]=1;
addr[5]=8;
addr[6]=0;
addr[7]=248;
// the first ROM byte indicates which chip
switch (addr[0]) {
case 0x10:
//Serial.println(" Chip = DS18S20"); // or old DS1820
type_s = 1;
break;
case 0x28:
//Serial.println(" Chip = DS18B20");
type_s = 0;
break;
case 0x22:
//Serial.println(" Chip = DS1822");
type_s = 0;
break;
default:
Serial.println("Device is not a DS18x20 family device.");
return;
}
ds.select(addr);
ds.write(0x44, 1); // start conversion, with parasite power on at the end
delay(1000); // maybe 750ms is enough, maybe not
// we might do a ds.depower() here, but the reset will take care of it.
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
for ( i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
}
// Convert the data to actual temperature
// because the result is a 16 bit signed integer, it should
// be stored to an "int16_t" type, which is always 16 bits
// even when compiled on a 32 bit processor.
raw = (data[1] << 8) | data[0];
if (type_s) {
raw = raw << 3; // 9 bit resolution default
if (data[7] == 0x10) {
// "count remain" gives full 12 bit resolution
raw = (raw & 0xFFF0) + 12 - data[6];
}
} else {
byte cfg = (data[4] & 0x60);
// at lower res, the low bits are undefined, so let's zero them
if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms
else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms
else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms
//// default is 12 bit resolution, 750 ms conversion time
}
Tc_100_B = (float)raw / 16.0;
// Lecture du quatrime module connect sur Digital PIN
//Serial.print("PoidsD_old=");
//Serial.println(AverageWeightold);
lire_scaleD();
//Serial.print("PoidsDnew=");
//Serial.println(AverageWeight);
while (AverageWeightold-AverageWeight>5) {
lire_scaleD();
if (ini==1) {
AverageWeightold=AverageWeight;
ini=0;
}
AverageWeightold=AverageWeight;
//Serial.print(".");
}
AverageWeightold=AverageWeight;
poidsD=AverageWeight*4.6645331632-4605.0-39148787.5+16000.0; // capteur de 200kg
//Read data and store it to variables hum and temp from DHT22 on pin #D2
hum = dht.readHumidity();
temp= dht.readTemperature();
}
void envoi_msg() {
//Serial.println("envoi ok ");
char str_tempa[10];
dtostrf(Tc_100_A, 4, 2, str_tempa);
char str_tempb[10];
dtostrf(Tc_100_B, 4, 2, str_tempb);
char str_poids[20];
dtostrf(poidsD, 4, 2, str_poids);
char str_tempc[10];
dtostrf(temp, 4, 2, str_tempc);
char str_hum[10];
dtostrf(hum, 4, 2, str_hum);
char message[100];
sprintf(message, ";GRJ;%s;%s;%s;%s;%s;0.0", str_tempa,str_tempb,str_tempc,str_hum,str_poids);
Serial.println(message);
}












{kind=link}
Comments