


The goal of the Simple Autonomous Wheeled Robot (SAWR) project is to define a basic "example robot" to demonstrate autonomous navigation using ROS with the Intel® RealSense™ 3D cameras. This robot can also be used as a software development and testing platform and to deliver training material.
The associated git repository contains the core hardware specifications, software, and documentation to enable you to build and run your own SAWR. The 01.org/sawr site will contain supplemental materials, such as blogs, tutorials, event notifications, and videos, to provide ongoing support to a community of SAWR users and builders.
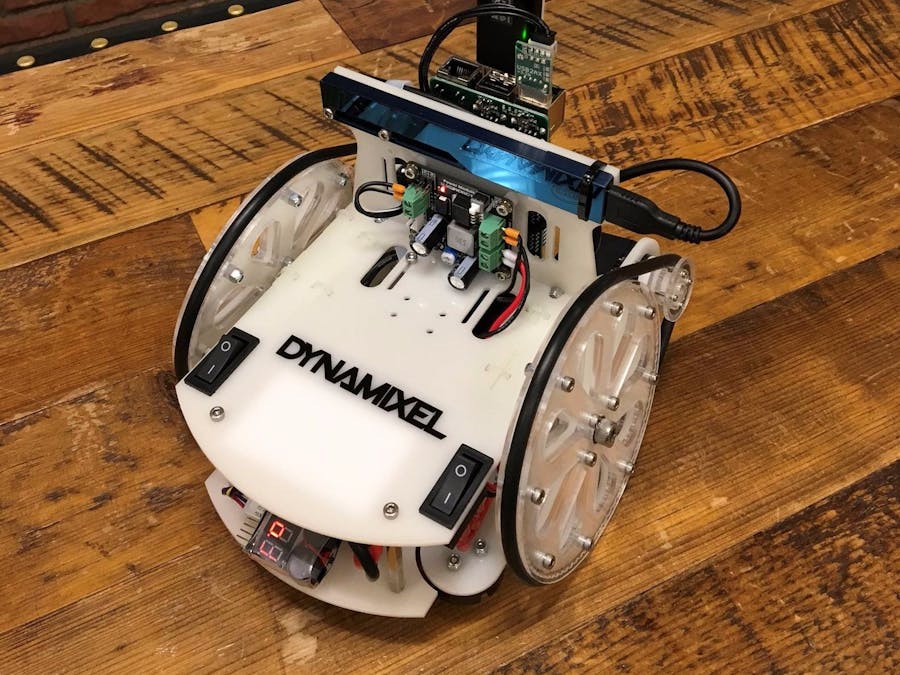
The frame of the SAWR is modeled using OpenSCAD and can be replicated easily with a laser cutter. For compute and sensing, for this initial release we have focused on the Intel® RealSense™ Robotic Development Kit which includes an Aaeon UP Board and an Intel® RealSense™ R200 3D camera
The current frame can also support a Intel® Joule™ Development Kit and a RealSense™ ZR300 3D camera, although we are still working on testing the SW stack for these options and writing instructions. Stay tuned!
In general, the SAWR is a work in progress and we intend to continue to update it with new technologies and capabilities. Follow this site or "watch" the github repo to be informed of updates.
GETTING STARTEDFirst, you need a robot. You can follow the Build and Assembly instructions to create your SAWR.
Second, to configure your robot's software stack, follow the Install and Launch instructions.
In general, you should look at the README on the github site for more detail on the SAWR.




Comments