

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
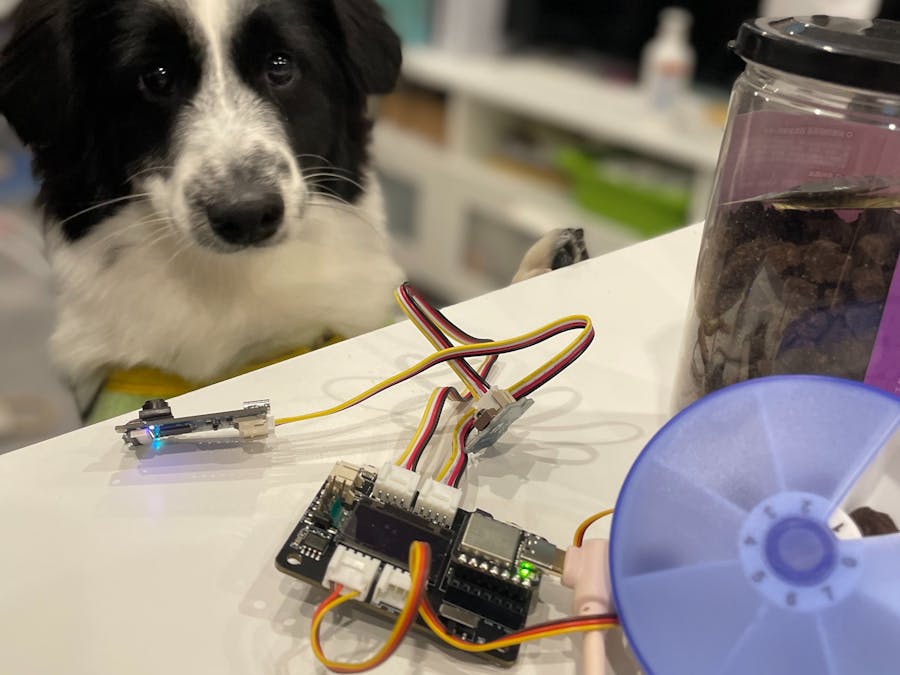
Is your dog being pickier with their food more often as they grow older? My dog is exactly like that. He always ran to play after a few bites of dog food after I poured it into the bowl. Due to my busy schedule, I am making an automatic dog treat feeder so that I won't have to watch him until he finishes all his food.
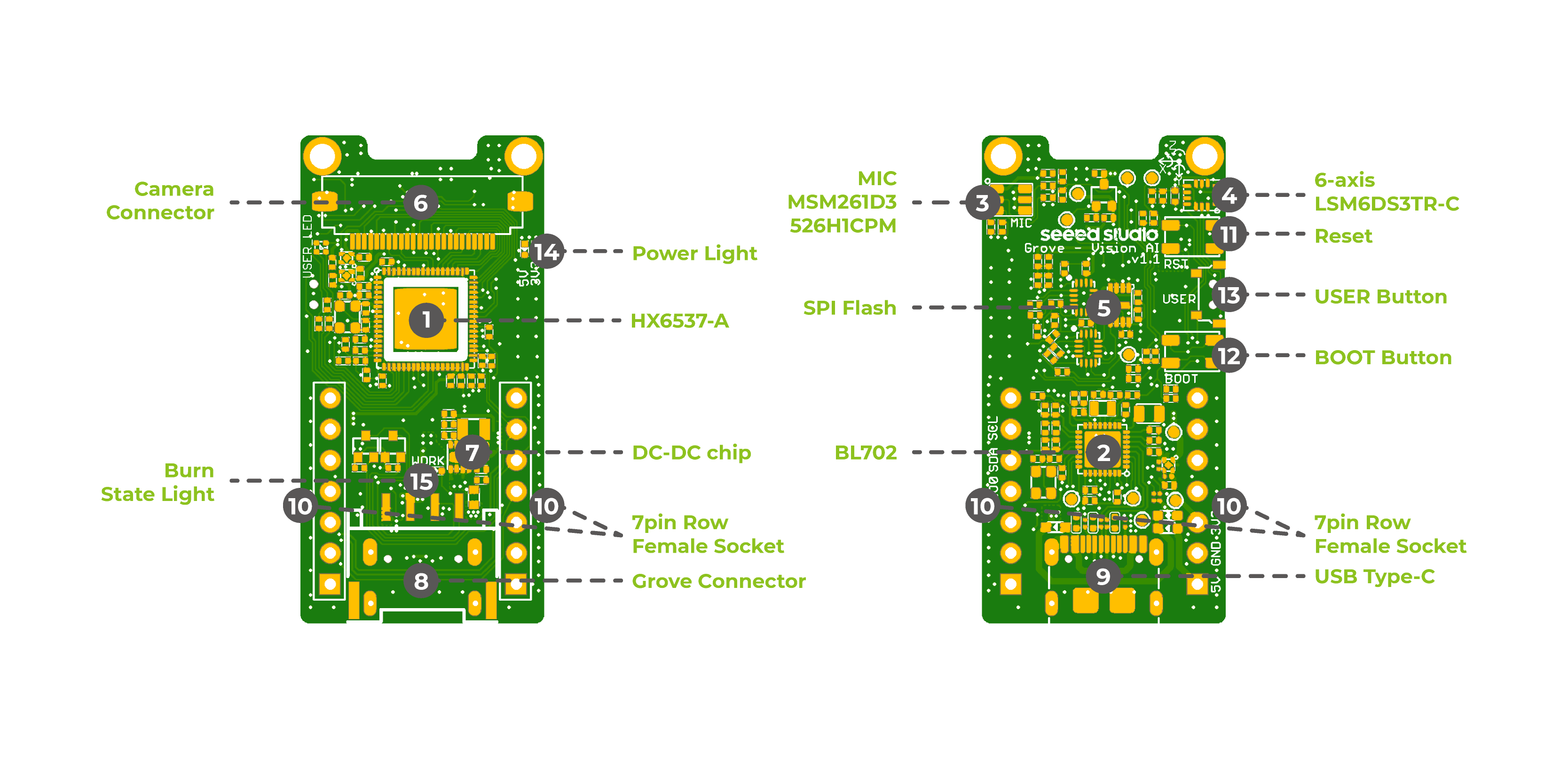
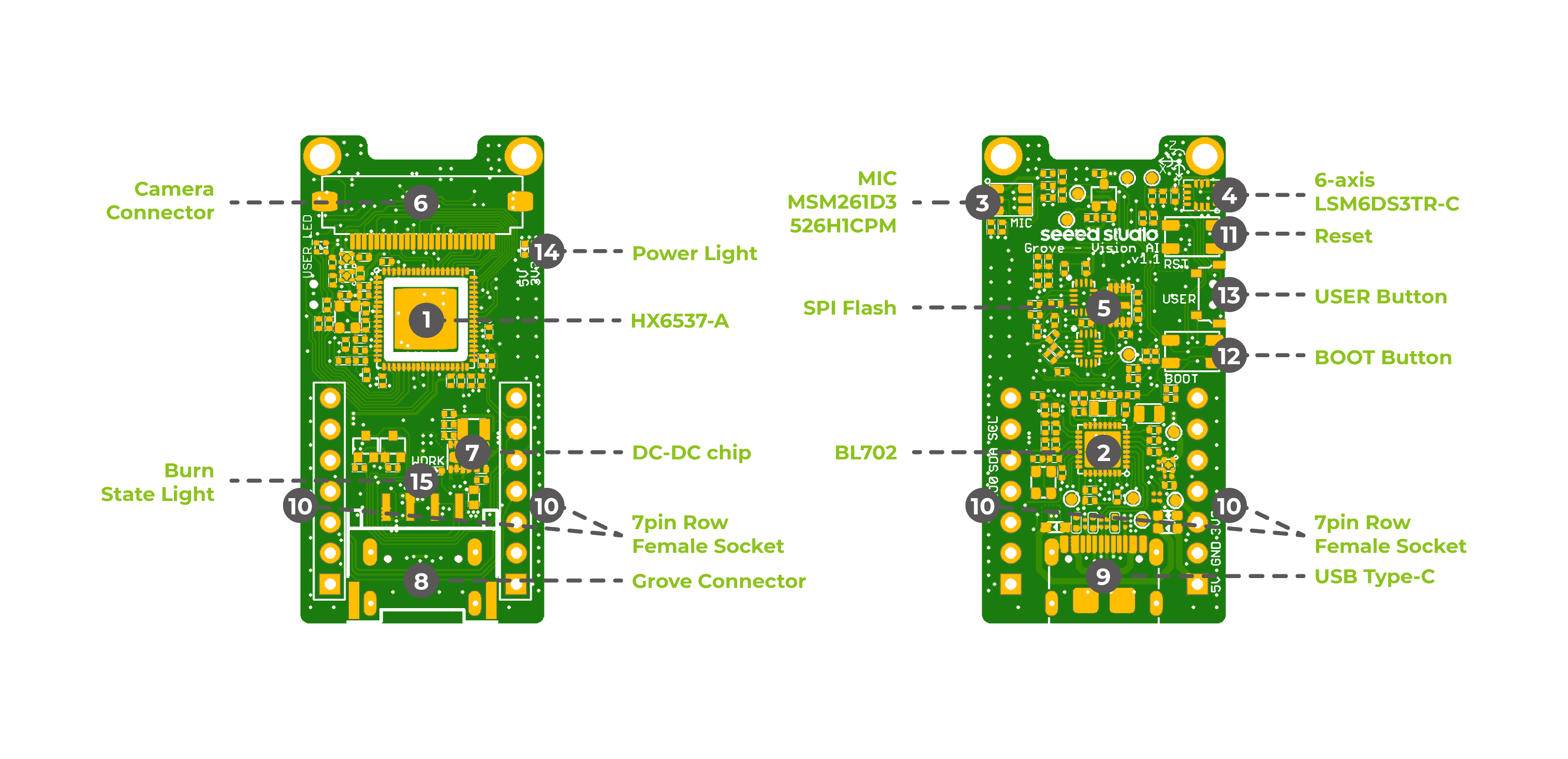
Grove Vision AI is used in this project to detect whether the dog's bowl is empty. It will automatically deliver a dog's favorite treat when an empty bowl is detected.
Through this device, I plan to train my dog gradually to form healthy eating habit.
Train your own AI model with your own datasetStep1. Install Python on your computer and then install libusb1
Step2. Boot your Vision AI
- -> Double-click the boot button to enter boot mode
- -> Drag and drop the below.uf2 files to GROVEAI drive
Step3. Capture images
Step4. Annotate dataset using Roboflow
Step5. Train your own dataset by using YOLOv5 on Google Colab
Step1. Drag and drop the dataset ‘model-1.uf2’ file to the GROVEAI drive
Step2. Install Seeed_Arduino_GroveAI library into Arduino IDE and open object_detection.ino example and Servo.ino
Install equipmentAs part of my project, my friend helped me make a feeder with a pill organizer and drilled holes in the back so screws could be installed to fix the servo. For identification, I placed it above the bowl.






{kind=link}
Comments