#include <Servo.h> // include servo library
#include <Arduino_APDS9960.h> // include sensor distance library
#include <PDM.h>
// calibration
int da = -12, // Left Front Pivot
db = 10, // Left Back Pivot
dc = -18, // Right Back Pivot
dd = 12; // Right Front Pivot
// servo initial positions + calibration
int a90 = (90 + da),
a120 = (120 + da),
a150 = (150 + da),
a180 = (180 + da);
int b0 = (0 + db),
b30 = (30 + db),
b60 = (60 + db),
b90 = (90 + db);
int c90 = (90 + dc),
c120 = (120 + dc),
c150 = (150 + dc),
c180 = (180 + dc);
int d0 = (0 + dd),
d30 = (30 + dd),
d60 = (60 + dd),
d90 = (90 + dd);
// start points for servo
int s11 = 90; // Front Left Pivot Servo
int s12 = 90; // Front Left Lift Servo
int s21 = 90; // Back Left Pivot Servo
int s22 = 90; // Back Left Lift Servo
int s31 = 90; // Back Right Pivot Servo
int s32 = 90; // Back Right Lift Servo
int s41 = 90; // Front Right Pivot Servo
int s42 = 90; // Front Right Lift Servo
int f = 0;
int b = 0;
int l = 0;
int r = 0;
int spd = 3; // Speed of walking motion, larger the number, the slower the speed
int high = 0; // How high the robot is standing
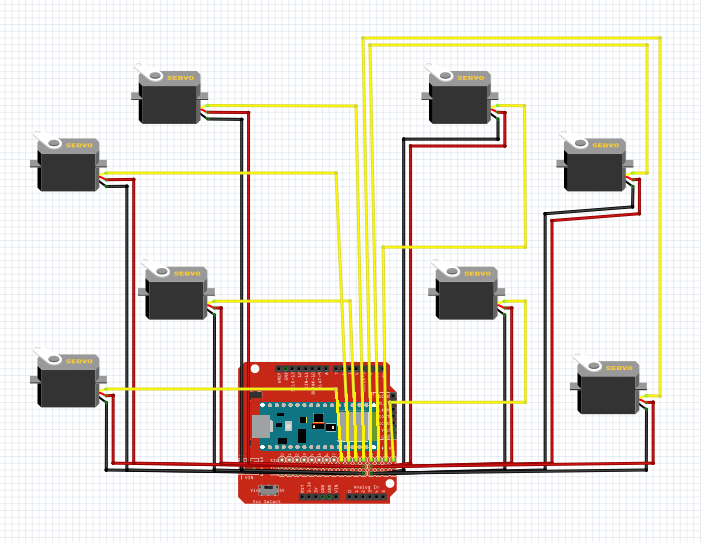
// Define 8 Servos
Servo myServo1; // Servo piv esquerdo frontal a4
Servo myServo2; // Servo de elevao frontal esquerdo 10
Servo myServo3; // Servo do piv esquerdo traseiro 5
Servo myServo4; // Servo de elevao traseira esquerda 6
Servo myServo5; // Servo de piv direito traseiro 3
Servo myServo6; // Servo de elevao traseira direita 9
Servo myServo7; // Servo de piv frontal direito 11
Servo myServo8; // Servo de elevao frontal direita a5
short sampleBuffer[256];
// number of samples read
volatile int samplesRead;
//===== Setup ==============================================================================
void setup()
{
// Attach servos to Arduino Pins
myServo1.attach(A4);
myServo2.attach(10);
myServo3.attach(5);
myServo4.attach(6);
myServo5.attach(3);
myServo6.attach(9);
myServo7.attach(11);
myServo8.attach(A5);
Serial.begin (9600);
// while (!Serial);
if (!APDS.begin()) {
Serial.println("Error initializing APDS9960 sensor!");
}
PDM.onReceive(onPDMdata);
if (!PDM.begin(1, 16000)) {
Serial.println("Failed to start PDM!");
while (1);
}
}//setup
//==========================================================================================
//== Loop ==================================================================================
void loop()
{
voice();
while (!APDS.proximityAvailable()) {
delay(5);
}
int proximity = APDS.readProximity(); //Read the distance
Serial.println(proximity);
if (proximity > 230) {
center_servos(); // Center all servos
high = 15; // Set hight to 15
spd = 7; // Set speed to 3
voice();
test(); //Test the sensors
forward(); //Walk forward function
}
else {
center_servos(); //centralize the servo leaving the spyder in the alert position
for (byte x = 0; x < 3; x++) {
back();
voice();
}
test();
for (byte x = 0; x < 3; x++) {
turn_left();
voice();
}
test();
}
}//loop
void dance()
{
center_servos();
delay(100);
lean_left();
delay(300);
lean_right();
delay(300);
lean_left();
delay(300);
lean_right();
delay(300);
lean_left();
delay(300);
lean_right();
delay(300);
lean_left();
delay(300);
lean_right();
delay(800);
center_servos();
delay(300);
bow();
center_servos();
}
//== Wave ==================================================================================
void wave()
{
/*
myServo1 - Front Left Pivot Servo
myServo2 - Front Left Lift Servo
myServo3 - Back Left Pivot Servo
myServo4 - Back Left Lift Servo
myServo5 - Back Right Pivot Servo
myServo6 - Back Right Lift Servo
myServo7 - Front Right Pivot Servo
myServo8 - Front Right Lift Servo
*/
center_servos();
myServo4.write(45);
myServo6.write(45);
delay(200);
myServo8.write(0);
delay(200);
myServo7.write(180);
delay(200);
myServo7.write(30);
delay(300);
myServo7.write(180);
delay(300);
myServo7.write(30);
delay(300);
myServo7.write(s41);
delay(300);
myServo8.write(s42);
center_servos();
}
void sit() {
delay(500);
myServo2.write(20);
myServo4.write(20);
myServo6.write(20);
myServo8.write(20);
delay(5000);
center_servos();
}
//== Bow ===================================================================================
void bow()
{
center_servos();
delay(200);
myServo2.write(15);
myServo8.write(15);
delay(700);
myServo2.write(90);
myServo8.write(90);
delay(700);
}
//== Lean_Left =============================================================================
void lean_left()
{
myServo2.write(15);
myServo4.write(15);
myServo6.write(150);
myServo8.write(150);
}
//== Lean_Right ============================================================================
void lean_right()
{
myServo2.write(150);
myServo4.write(150);
myServo6.write(15);
myServo8.write(15);
}
//== Lean_Left =============================================================================
void trim_left()
{
da--; // Left Front Pivot
db--; // Left Back Pivot
dc--; // Right Back Pivot
dd--; // Right Front Pivot
}
//== Lean_Right ============================================================================
void trim_right()
{
da++; // Left Front Pivot
db++; // Left Back Pivot
dc++; // Right Back Pivot
dd++; // Right Front Pivot
}
//== Forward ===============================================================================
void forward()
{
// calculation of points
// Left Front Pivot
a90 = (90 + da),
a120 = (120 + da),
a150 = (150 + da),
a180 = (180 + da);
// Left Back Pivot
b0 = (0 + db),
b30 = (30 + db),
b60 = (60 + db),
b90 = (90 + db);
// Right Back Pivot
c90 = (90 + dc),
c120 = (120 + dc),
c150 = (150 + dc),
c180 = (180 + dc);
// Right Front Pivot
d0 = (0 + dd),
d30 = (30 + dd),
d60 = (60 + dd),
d90 = (90 + dd);
// set servo positions and speeds needed to walk forward one step
// (LFP, LBP, RBP, RFP, LFL, LBL, RBL, RFL, S1, S2, S3, S4)
srv(a180, b0 , c120, d60, 42, 33, 33, 42, 1, 3, 1, 1);
srv( a90, b30, c90, d30, 6, 33, 33, 42, 3, 1, 1, 1);
srv( a90, b30, c90, d30, 42, 33, 33, 42, 3, 1, 1, 1);
srv(a120, b60, c180, d0, 42, 33, 6, 42, 1, 1, 3, 1);
srv(a120, b60, c180, d0, 42, 33, 33, 42, 1, 1, 3, 1);
srv(a150, b90, c150, d90, 42, 33, 33, 6, 1, 1, 1, 3);
srv(a150, b90, c150, d90, 42, 33, 33, 42, 1, 1, 1, 3);
srv(a180, b0, c120, d60, 42, 6, 33, 42, 1, 3, 1, 1);
//srv(a180, b0, c120, d60, 42, 15, 33, 42, 1, 3, 1, 1);
test();
}
//== Back ==================================================================================
void back ()
{
// set servo positions and speeds needed to walk backward one step
// (LFP, LBP, RBP, RFP, LFL, LBL, RBL, RFL, S1, S2, S3, S4)
srv(180, 0, 120, 60, 42, 33, 33, 42, 3, 1, 1, 1);
srv(150, 90, 150, 90, 42, 18, 33, 42, 1, 3, 1, 1);
srv(150, 90, 150, 90, 42, 33, 33, 42, 1, 3, 1, 1);
srv(120, 60, 180, 0, 42, 33, 33, 6, 1, 1, 1, 3);
srv(120, 60, 180, 0, 42, 33, 33, 42, 1, 1, 1, 3);
srv(90, 30, 90, 30, 42, 33, 18, 42, 1, 1, 3, 1);
srv(90, 30, 90, 30, 42, 33, 33, 42, 1, 1, 3, 1);
srv(180, 0, 120, 60, 6, 33, 33, 42, 3, 1, 1, 1);
}
//== Left =================================================================================
void turn_left ()
{
// set servo positions and speeds needed to turn left one step
// (LFP, LBP, RBP, RFP, LFL, LBL, RBL, RFL, S1, S2, S3, S4)
srv(150, 90, 90, 30, 42, 6, 33, 42, 1, 3, 1, 1);
srv(150, 90, 90, 30, 42, 33, 33, 42, 1, 3, 1, 1);
srv(120, 60, 180, 0, 42, 33, 6, 42, 1, 1, 3, 1);
srv(120, 60, 180, 0, 42, 33, 33, 24, 1, 1, 3, 1);
srv(90, 30, 150, 90, 42, 33, 33, 6, 1, 1, 1, 3);
srv(90, 30, 150, 90, 42, 33, 33, 42, 1, 1, 1, 3);
srv(180, 0, 120, 60, 6, 33, 33, 42, 3, 1, 1, 1);
srv(180, 0, 120, 60, 42, 33, 33, 33, 3, 1, 1, 1);
}
//== Right ================================================================================
void turn_right ()
{
// set servo positions and speeds needed to turn right one step
// (LFP, LBP, RBP, RFP, LFL, LBL, RBL, RFL, S1, S2, S3, S4)
srv( 90, 30, 150, 90, 6, 33, 33, 42, 3, 1, 1, 1);
srv( 90, 30, 150, 90, 42, 33, 33, 42, 3, 1, 1, 1);
srv(120, 60, 180, 0, 42, 33, 33, 6, 1, 1, 1, 3);
srv(120, 60, 180, 0, 42, 33, 33, 42, 1, 1, 1, 3);
srv(150, 90, 90, 30, 42, 33, 6, 42, 1, 1, 3, 1);
srv(150, 90, 90, 30, 42, 33, 33, 42, 1, 1, 3, 1);
srv(180, 0, 120, 60, 42, 6, 33, 42, 1, 3, 1, 1);
srv(180, 0, 120, 60, 42, 33, 33, 42, 1, 3, 1, 1);
}
//== Center Servos ========================================================================
void center_servos()
{
myServo1.write(90);
myServo2.write(90);
myServo3.write(90);
myServo4.write(90);
myServo5.write(90);
myServo6.write(90);
myServo7.write(90);
myServo8.write(90);
int s11 = 90; // Front Left Pivot Servo
int s12 = 90; // Front Left Lift Servo
int s21 = 90; // Back Left Pivot Servo
int s22 = 90; // Back Left Lift Servo
int s31 = 90; // Back Right Pivot Servo
int s32 = 90; // Back Right Lift Servo
int s41 = 90; // Front Right Pivot Servo
int s42 = 90; // Front Right Lift Servo
}
//== Increase Speed ========================================================================
void increase_speed()
{
if (spd > 3)
spd--;
}
//== Decrease Speed ========================================================================
void decrease_speed()
{
if (spd < 50)
spd++;
}
//== Srv ===================================================================================
void srv( int p11, int p21, int p31, int p41, int p12, int p22, int p32, int p42, int sp1, int sp2, int sp3, int sp4)
{
voice();
// p11: Front Left Pivot Servo
// p21: Back Left Pivot Servo
// p31: Back Right Pivot Servo
// p41: Front Right Pivot Servo
// p12: Front Left Lift Servo
// p22: Back Left Lift Servo
// p32: Back Right Lift Servo
// p42: Front Right Lift Servo
// sp1: Speed 1
// sp2: Speed 2
// sp3: Speed 3
// sp4: Speed 4
// Multiply lift servo positions by manual height adjustment
p12 = p12 + high * 3;
p22 = p22 + high * 3;
p32 = p32 + high * 3;
p42 = p42 + high * 3;
while ((s11 != p11) || (s21 != p21) || (s31 != p31) || (s41 != p41) || (s12 != p12) || (s22 != p22) || (s32 != p32) || (s42 != p42))
{
// Front Left Pivot Servo
if (s11 < p11) // if servo position is less than programmed position
{
if ((s11 + sp1) <= p11)
s11 = s11 + sp1; // set servo position equal to servo position plus speed constant
else
s11 = p11;
}
if (s11 > p11) // if servo position is greater than programmed position
{
if ((s11 - sp1) >= p11)
s11 = s11 - sp1; // set servo position equal to servo position minus speed constant
else
s11 = p11;
}
// Back Left Pivot Servo
if (s21 < p21)
{
if ((s21 + sp2) <= p21)
s21 = s21 + sp2;
else
s21 = p21;
}
if (s21 > p21)
{
if ((s21 - sp2) >= p21)
s21 = s21 - sp2;
else
s21 = p21;
}
// Back Right Pivot Servo
if (s31 < p31)
{
if ((s31 + sp3) <= p31)
s31 = s31 + sp3;
else
s31 = p31;
}
if (s31 > p31)
{
if ((s31 - sp3) >= p31)
s31 = s31 - sp3;
else
s31 = p31;
}
// Front Right Pivot Servo
if (s41 < p41)
{
if ((s41 + sp4) <= p41)
s41 = s41 + sp4;
else
s41 = p41;
}
if (s41 > p41)
{
if ((s41 - sp4) >= p41)
s41 = s41 - sp4;
else
s41 = p41;
}
// Front Left Lift Servo
if (s12 < p12)
{
if ((s12 + sp1) <= p12)
s12 = s12 + sp1;
else
s12 = p12;
}
if (s12 > p12)
{
if ((s12 - sp1) >= p12)
s12 = s12 - sp1;
else
s12 = p12;
}
// Back Left Lift Servo
if (s22 < p22)
{
if ((s22 + sp2) <= p22)
s22 = s22 + sp2;
else
s22 = p22;
}
if (s22 > p22)
{
if ((s22 - sp2) >= p22)
s22 = s22 - sp2;
else
s22 = p22;
}
// Back Right Lift Servo
if (s32 < p32)
{
if ((s32 + sp3) <= p32)
s32 = s32 + sp3;
else
s32 = p32;
}
if (s32 > p32)
{
if ((s32 - sp3) >= p32)
s32 = s32 - sp3;
else
s32 = p32;
}
// Front Right Lift Servo
if (s42 < p42)
{
if ((s42 + sp4) <= p42)
s42 = s42 + sp4;
else
s42 = p42;
}
if (s42 > p42)
{
if ((s42 - sp4) >= p42)
s42 = s42 - sp4;
else
s42 = p42;
}
// Write Pivot Servo Values
myServo1.write(s11 + da);
myServo3.write(s21 + db);
myServo5.write(s31 + dc);
myServo7.write(s41 + dd);
// Write Lift Servos Values
myServo2.write(s12);
myServo4.write(s22);
myServo6.write(s32);
myServo8.write(s42);
delay(spd); // Delay before next movement
}//while
} //srv
void test() {
ligth();
movement();
/*
Se tiver luz{
center_servos();
Funo danar: dance();
}
*/
/*
Se tiver gestos{
center_servos();
Funo tchauzinho: wave();
}
*/
/*
Se ouvir voz{
center_servos();
Funo sentar: sit():
}
*/
}
void ligth() {
while (! APDS.colorAvailable()) {
delay(3);
}
int r, g, b;
// read the color
APDS.readColor(r, g, b);
while (r > 20 || g > 20 || b > 20) {
dance();
while (! APDS.colorAvailable()) {
delay(3);
}
APDS.readColor(r, g, b);
}
// print the values
/* Serial.print("r = ");
Serial.println(r);
Serial.print("g = ");
Serial.println(g);
Serial.print("b = ");
Serial.println(b);
Serial.println();*/
}
void movement() {
}
void voice() {
if (samplesRead) {
// print samples to the serial monitor or plotter
for (int i = 0; i < samplesRead; i++) {
// Serial.println(sampleBuffer[i]);
if(sampleBuffer[i]>1000){
// Serial.println("Ouvi: " + String(sampleBuffer[i]));
center_servos();
sit();
}
}
// clear the read count
samplesRead = 0;
}
}
void onPDMdata() {
// query the number of bytes available
int bytesAvailable = PDM.available();
// read into the sample buffer
PDM.read(sampleBuffer, bytesAvailable);
// 16-bit, 2 bytes per sample
samplesRead = bytesAvailable / 2;
}


















{kind=link}
Comments