

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Smart home applications have been growing and companies keep developing ideas to make these applications more appealing to customers. It is still an open market and a good environment for more creation and development. Our team is aiming to participate in that industry by developing new solutions and providing more convenience to users. Our project uses Hexabitz modules for our hardware circuit. Hexabitz has been developing various modules that can be integrated together to build a complete PCB (printed circuit board) that can be programmed and controlled using software platforms.
Background and MotivationThere are existing applications of smart home and smart switches in the market and we are working on developing a newer version. Our system involves using IOT (Internet of things) systems, where we used the common AI (Artificial intelligence) system Google home assistance, to use voice commands to turn on and off switches. We have a website that can control and display the status of each device plugged into the system, this is done to give better access to people with hearing disabilities.
The capstone group has designed and built a smart switch that can be voice controlled by Google home assistant. This switch uses wireless XBee antennas to set up an area of coverage for control. Also, people who do not speak English or people who have hearing disabilities can access a web interface to turn on and off the devices remotely.
One growing topic of concern over home automation is the use of data from smart devices. Large companies like Amazon and Google request data from smart devices everytime they are used. For example, if a person tells Google Assistant to turn off a device, the device will report to Google that it has been turned off. Google and Amazon have been recording user data about smart devices since their inception, and the public is starting to notice. Companies are even voicing their concern that consumers do not have enough control over what information is sent to large AI companies. The issue of data privacy is of concern to the team, and is something that will be addressed in the development of the project. One way to mitigate user data from being sent to Amazon and Google is to use independent services like IFTTT.com. This website does not directly communicate user data to Google, and will therefore protect the privacy of the user.
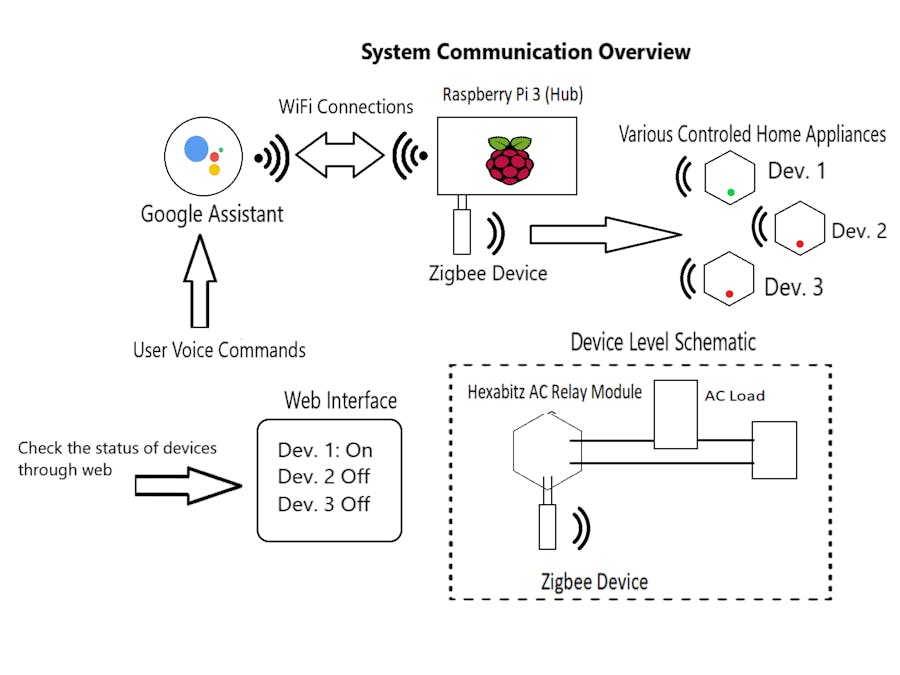
Overview of proposed projectThis project demonstrates the capabilities of Hexabitz modules through integration into a home automation system. The team created an interconnected system using multiple devices. The project demonstrates the capabilities of home automation using AI and low power radio communication. The system takes voice commands from a user, and toggles power to an AC load, including lamps, fans, radios, and other home devices. Also included is a web interface which displays the status of such home devices. A user gives names to individual home devices, and then the AI can turn each individual device on or off. The AI system will use a home WiFi connection to link the Raspberry Pi to a Google Assistant. The Raspberry Pi uses a Zigbee communication device to send commands to Hexabitz Relay Modules that control the AC loads. The end product is user friendly and packaged into a clean design. The package has an input plug and an output plug to easily fit in between an appliance and a wall outlet.
DeliverablesThe team has delivered a completed system, as described in the Project Overview Section of this Proposal. Below is a detailed list of the deliverables which has been completed by the team:
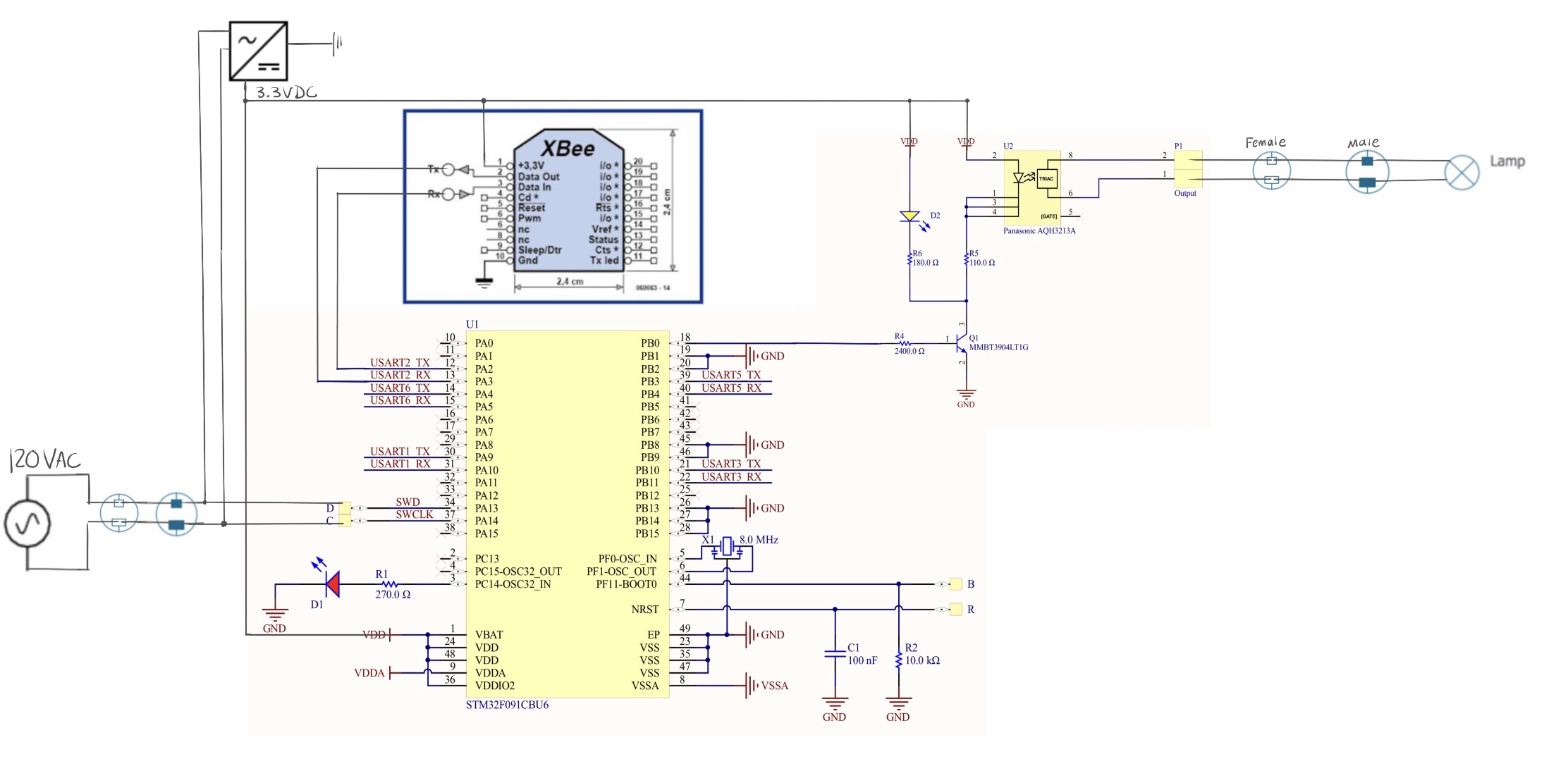
1. Creation of two Hexabitz power control modules that accept wireless commands from a Raspberry Pi to control power to an AC load.
2. Demonstration of the ability to control power to an AC load via voice commands from an AI device, and monitor the status (ON/OFF) of such home appliances through a web service.
3. A Raspberry Pi module which can control the power to home appliances in various rooms throughout a home.
4. Provide documentation on how each subsystem was connected, and how the Hexabitz AC switch functions.
5. Provide a website-based user interface. The website provides remote access control.
6. Develop a (graphical user interface) GUI that the homeowner can use to reprogram the Raspberry Pi. This GUI will provide controls for the Raspberry Pi so modules can be added or deleted as needed.
Project DemonstrationProject ImagesCode Block Logic
Project Design Team:
- Mohammed Almousa
- Robert Menke
- Sam Stevens
- Jignesh Trivedi
Industrial Advisor:
- Dr. Asaad Kaadan
Academic Advisor:
- Dr. Wayne Kimura
Date:
- June 14, 2019
This project is free to use for anyone who is interested. However, there are come important tasks that must be completed in order to program Hexabitz modules, Xbees, and linking accounts. If you require any information on how to recreate this project, please feel free to reach out. Links to account and software directories can be found below:
https://ifttt.com/
https://www.adafruit.com
https://bitbucket.org/account/user/hexabitz/projects/MOD
https://www.keil.com/download/product/
https://hackaday.io/list/87488-hexabitz-projects









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments