/*
* @file BLE-control_motord_rive.ino
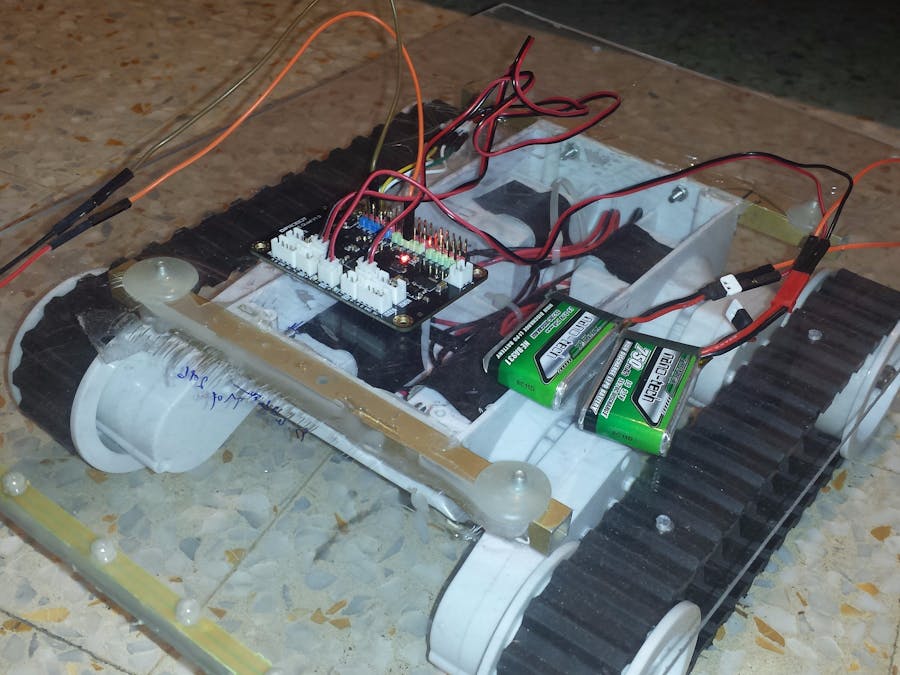
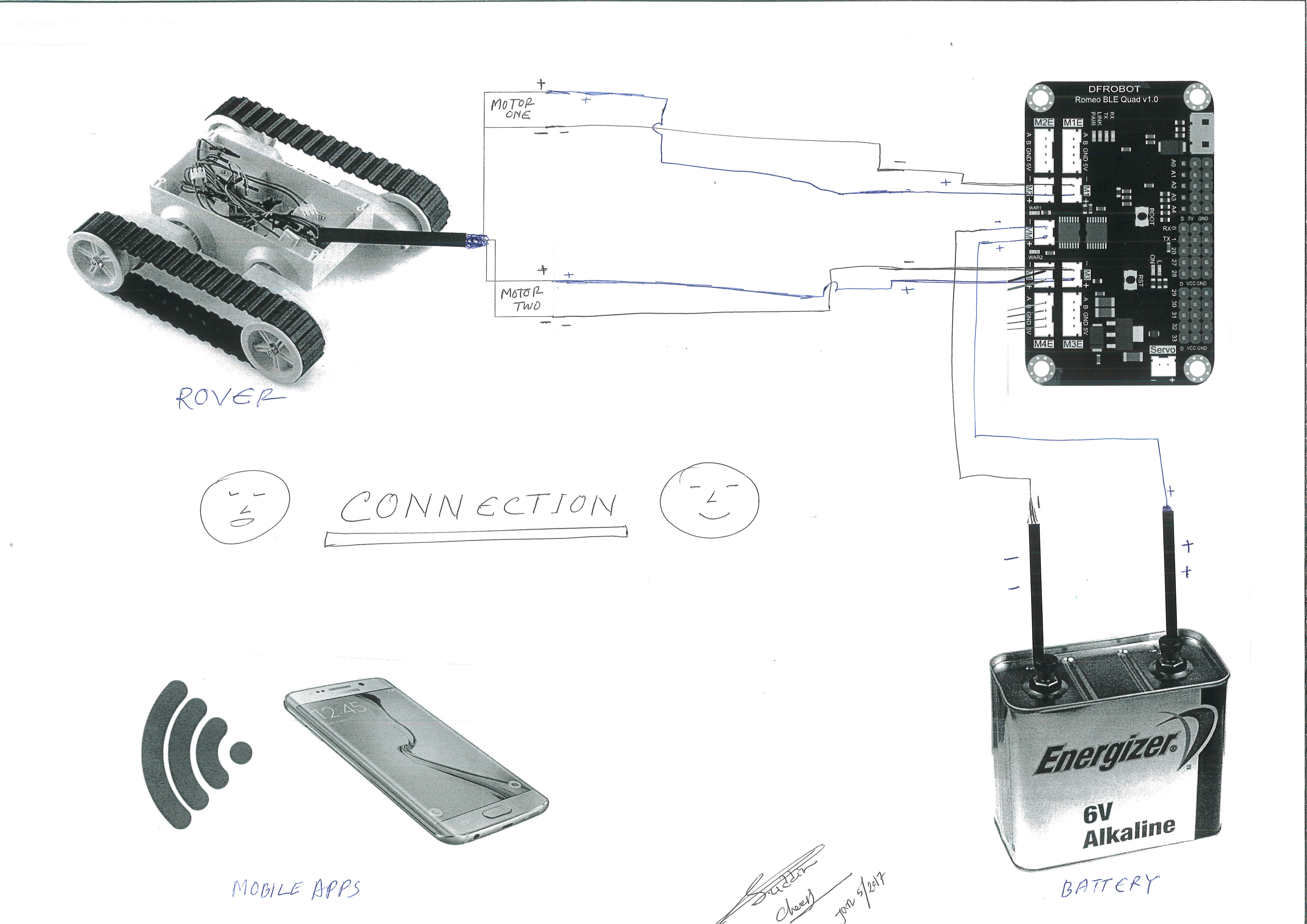
* @brief Motor control program for Romeo BLE Quard V1.0 using Mobile Application via Bluethooth
* @Control Command Use 'F'for Forward 'B' for backwoard 'L' for Left and 'R' for Right
* @ Here i use two Motor noly MA and MC possible to extend with forur Motor
* control motor using BLE via Bluno Test Apps
*
* @author akash.bangla@gmail.com
* @version V1.0
* @date 2017-01-05
* pin mapping ref: https://www.dfrobot.com/wiki/index.php/Romeo_BLE_Quad_Robot_Controller_SKU:_DFR0398
* product wiki: https://www.dfrobot.com/wiki/index.php/Romeo_BLE_Quad_Robot_Controller_SKU:_DFR0398
*/
// motor one
const int IA1=8;
const int IA2=23;
// motor Two
const int IB1=7;
const int IB2=9;
// motor Three
const int IC1=24;
const int IC2=14;
// motor four
const int ID1=4;
const int ID2=25;
byte byteRead;
void setup() {
Serial1.begin(115200); //initial the Serial
//use four motor
pinMode(IA1, OUTPUT);
pinMode(IA2, OUTPUT);
pinMode(IB1, OUTPUT);
pinMode(IB2, OUTPUT);
pinMode(IC1, OUTPUT);
pinMode(IC2, OUTPUT);
pinMode(ID1, OUTPUT);
pinMode(ID2, OUTPUT);
pinMode(13, OUTPUT);
pinMode (20,OUTPUT); // place a LED on pin 20
}
//use slow decay PWM value maximum 100 ref https://www.dfrobot.com/wiki/index.php/Dual_1.5A_Motor_Driver_-_HR8833_SKU:_DRI0040
void loop() {
digitalWrite(13,LOW);
digitalWrite(20,LOW);
Motor_reset();
/* check if data has been sent from the computer: */
if (Serial1.available()) {
/* read the most recent byte */
byteRead = Serial1.read();
/*Listen for a F which means Forward */
if(byteRead== 'F'){
Serial1.println("Moving Forward");
digitalWrite(13,HIGH);
digitalWrite(20,HIGH);
MA_move(50,0);
MC_move(50,0);
delay(1000);
}
else if (byteRead == 'B')
{
Serial1.println("Moving Backword");
digitalWrite(20,HIGH);
MA_move(50,1);
MC_move(50,1);
delay(1000);
}
else if (byteRead == 'L')
{
Serial1.println("Moving Left");
digitalWrite(20,HIGH);
MA_move(50,0);
MC_move(50,1);
delay(1000);
}
else if (byteRead == 'R')
{
Serial1.println("Moving Right");
digitalWrite(20,HIGH);
MA_move(50,1);
MC_move(50,0);
delay(1000);
}
else{
/*ECHO the value that was read, back to the serial port. */
Serial1.write(byteRead);
}
}
}
//fuction that reset all the motor
void Motor_reset()
{
//reset the motor A
digitalWrite(IA1,LOW);
digitalWrite(IA2,LOW);
//reset the motor B
digitalWrite(IB1,LOW);
digitalWrite(IB2,LOW);
//reset the motor C
digitalWrite(IC1,LOW);
digitalWrite(IC2,LOW);
//reset the motor D
digitalWrite(ID1,LOW);
digitalWrite(ID2,LOW);
}
void MA_move(int Speed,int dir) //for dir FALSE move forward, otherwise Backword
{
if (dir == 0)
{
analogWrite(IA1,Speed); //set the PWM value
digitalWrite(IA2,HIGH);
}
else
{
analogWrite(IA2,Speed); //set the PWM value
digitalWrite(IA1,HIGH);
}
}
void MB_move(int Speed,bool dir) //for dir FALSE move forward, otherwise Backword
{
if (dir == 0)
{
analogWrite(IB1,Speed); //set the PWM value
digitalWrite(IB2,HIGH);
}
else
{
analogWrite(IB2,Speed); //set the PWM value
digitalWrite(IB1,HIGH);
}
}
void MC_move(int Speed,bool dir) //for dir FALSE move forward, otherwise Backword
{
if (dir == 0)
{
analogWrite(IC1,Speed); //set the PWM value
digitalWrite(IC2,HIGH);
}
else
{
analogWrite(IC2,Speed); //set the PWM value
digitalWrite(IC1,HIGH);
}
}
void MD_move(int Speed,bool dir) //for dir FALSE move forward, otherwise Backword
{
if (dir == 0)
{
analogWrite(ID1,Speed); //set the PWM value
digitalWrite(ID2,HIGH);
}
else
{
analogWrite(ID2,Speed); //set the PWM value
digitalWrite(ID1,HIGH);
}
}






{kind=link}
Comments