ObjectiveThe primary objective of this project is to use Hexiwear to monitor the pH and temperature levels of swimming pools.
Hexiwear SetupThe Hexiwear can be placed anywhere near the bluetooth range of the Hardware Sensor. Using the LCD screen, it displays the Temp and pH Sensor.
The Hexiware can be programmed to analyze the data from sensors given the computation of Langelier Saturation Index (LSI). Using the LSI we can calculate if the pool is acidic, alkaline or in normal level. The computation can also give recommendations on how many chemicals to be put on the water to stabilize the level.
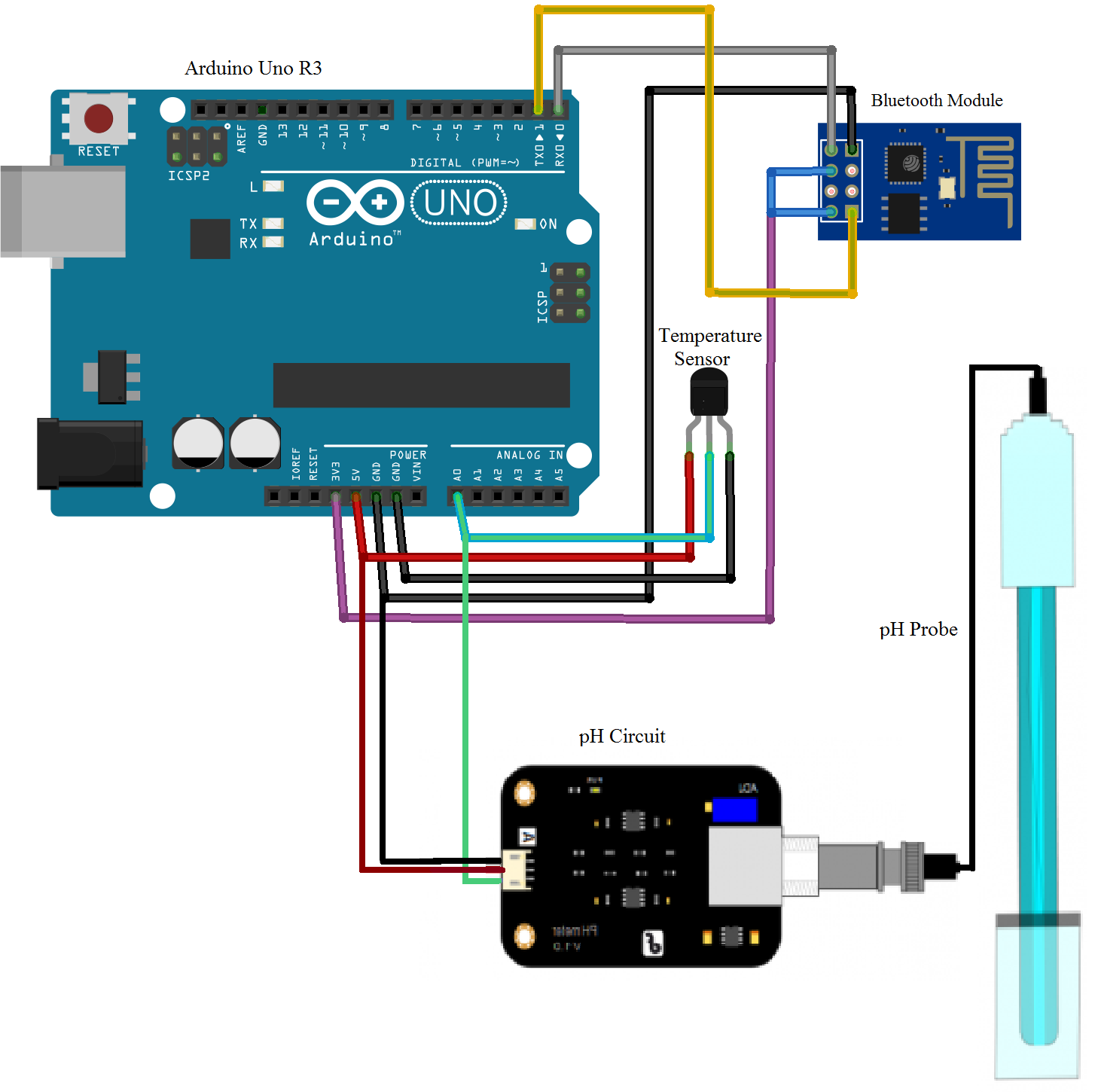
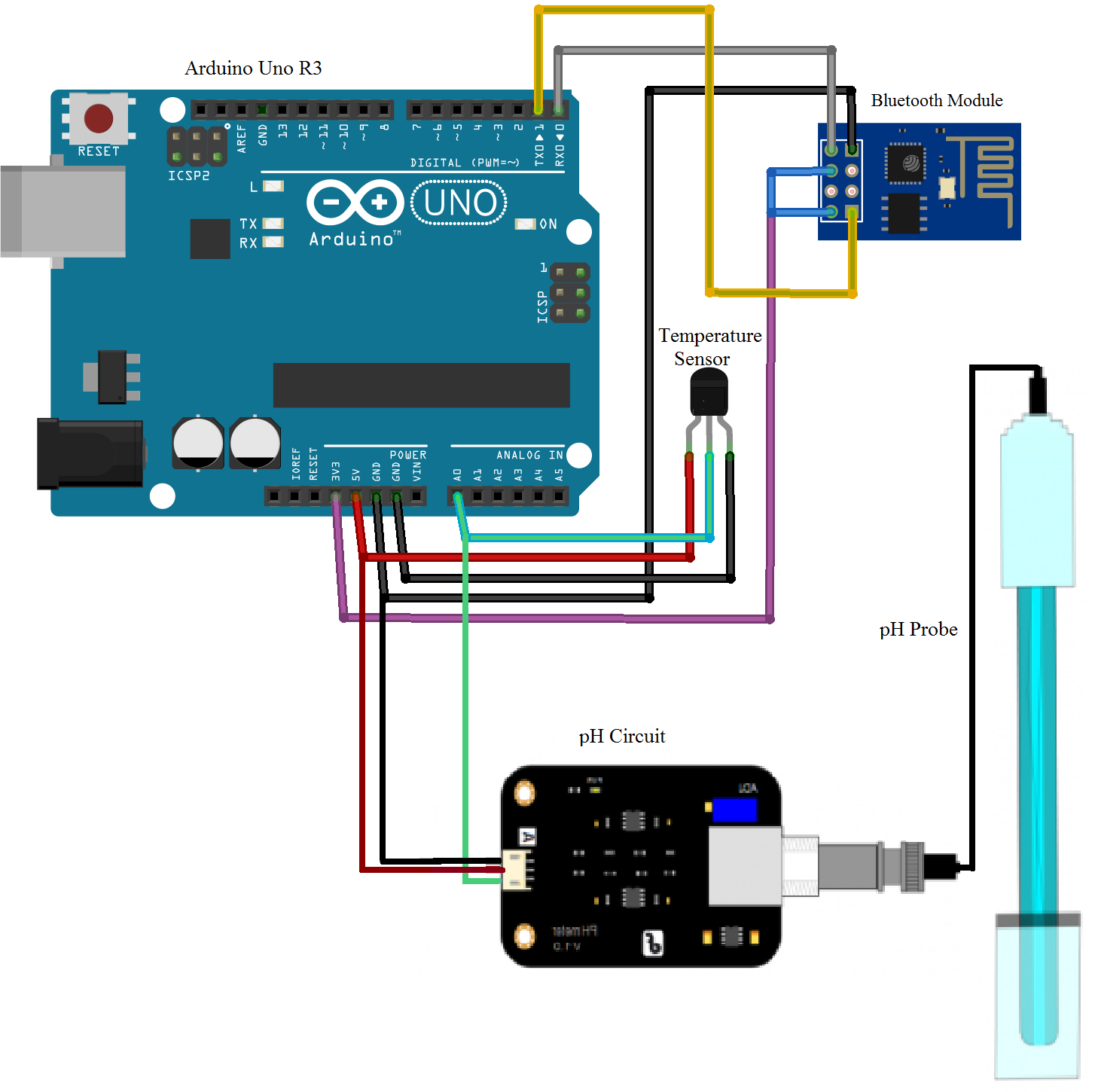
Hardware Sensor SetupThe hardware station prototype is placed inside a 4.3” x 1.9” rectangular plastic container and was created by connecting an Arduino Uno R3 to a pH sensor, temperature sensor, and Bluetooh Module. The power source is connected through a USB cable and power bank.
Field TestWe have tested the hardware sensor to Private, Public and School Swimming Pool. Collecting the data from these respondents' pool enabled us to analyze the capability of the hardware.
Public Pool
Photos from a Public Resort.
Private Pool
Photos from a Rest House Swimming pool.
School Pool
Photos from a private school swimming pool.
We wanted to provide an automated swimming pool water quality monitoring.
The development is still in progress. But we hope that through this, may there will be an increased awareness regarding the continuous degradation of the swimming pool water quality as people tend to focus more on the amenities that are offered instead of checking how safe they are. They also intend to contribute to the community by being able to provide a means to make water quality testing more efficient and effective without the unnecessary sacrifice of resources.




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments