


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
| ||||||
Elektro was a humanoid robot built by Westinghouse in 1937 to showcase a future where automatons would take care of household chores. For those who follow the history of robotics, he’s fascinating—not just for his imposing size, but for his steel bodywork that feels closer to craftsmanship than mass production, and for the quirky extravagances hidden in his functions.
The idea of building something like the legendary Elektro crafted mostly from recycled metals and salvaged electronics for the Nerdearla tech conference started out surrounded by questions. Would we find enough metal? What would it cost? How could we handle the electronics remotely while coordinating the body build? How do you mount anchors and generate torque to move a jaw? How do you even transport a 6.11-foot robot? And what happens to it after the conference?They say calculations never make a hero, so we dove into building our Elektro without having answers to any of these questions.
The first step was getting metals—lots of metals. We used 25-liter air compressors, cooling tanks, fridge drums, sheet-metal curtain rods, shock absorbers, bearings, and parts from household appliances like stoves and washing machines. These pieces were cut and welded using MIG and electric welders, then polished with flap discs.
The body work was carried out by Mauro de Giuseppe with the help of his students from EPS School No. 1 in General Las Heras. This school trains students in trades, providing young people in vulnerable situations with practical skills and tools for the workforce.
Once the head was ready, I drove out to pick it up and bring it back to my workshop to start on the electronics. The handoff happened in the parking lot of a fast-food joint. Some people witnessed a rather curious exchange: a huge metal head changing hands.
I began testing with DFRobot’s Unihiker M10 board connected to its carrier, since it already provided DC jack power, a motor driver, and servo connectors. But to output amplified audio I needed a USB sound card, and between the carrier and the USB gear, most of the head’s interior was going to get swallowed up.
The second option was an ESP32, but once I added the motor driver and powered it through the VIN pin, it started acting erratically. Digging through my drawers, I found an old ESP8266 NodeMCU Amica. With AI-Claude’s help I adapted the code in seconds, and it passed every test—earning its place as Elektro’s brain.For the Nerdearla conference 2025, Elektro’s functions were designed to:
- Deliver event announcements
- Move his jaw while speaking
- Give the impression of smoking cigarettes
- Can operate autonomously or be controlled remotely over WiF
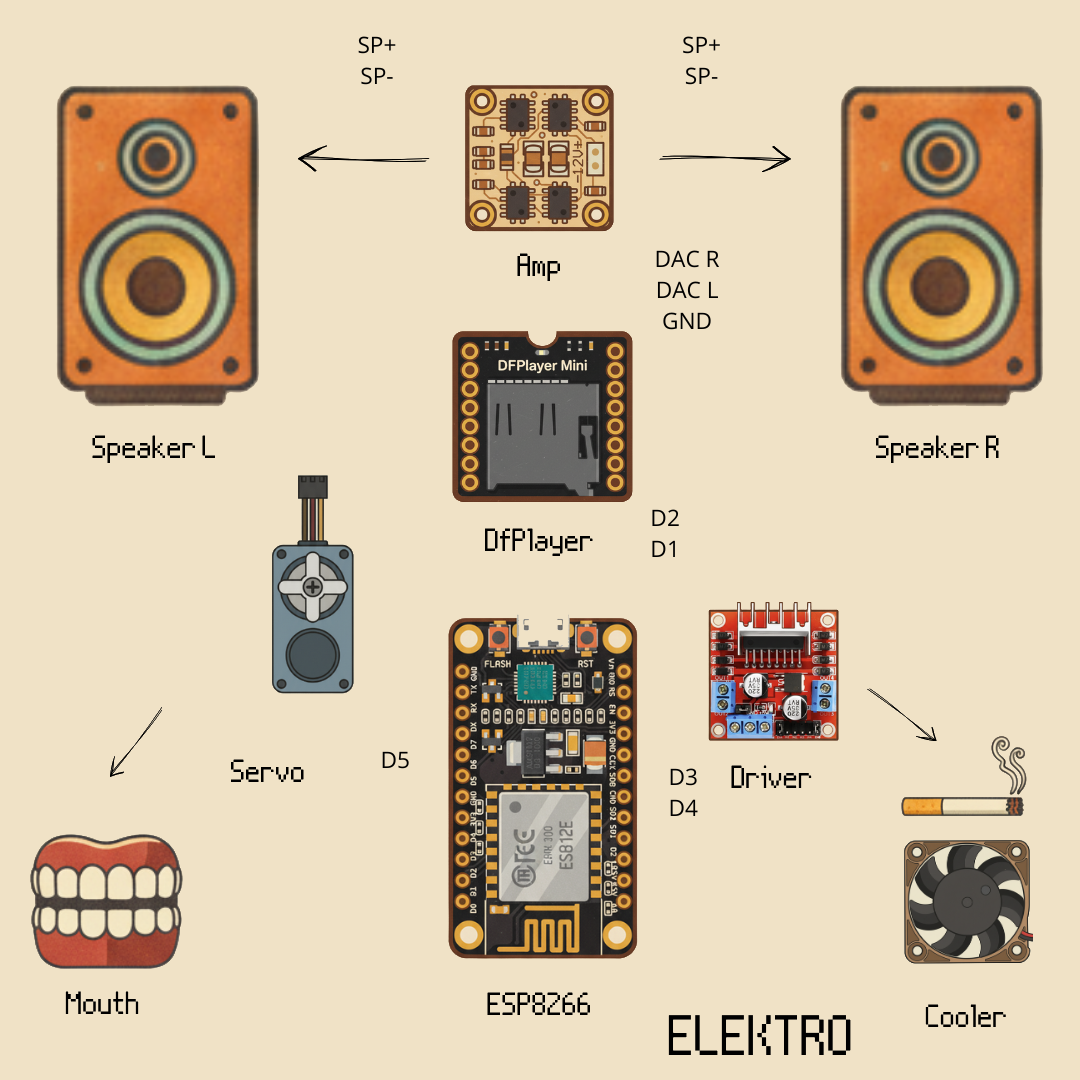
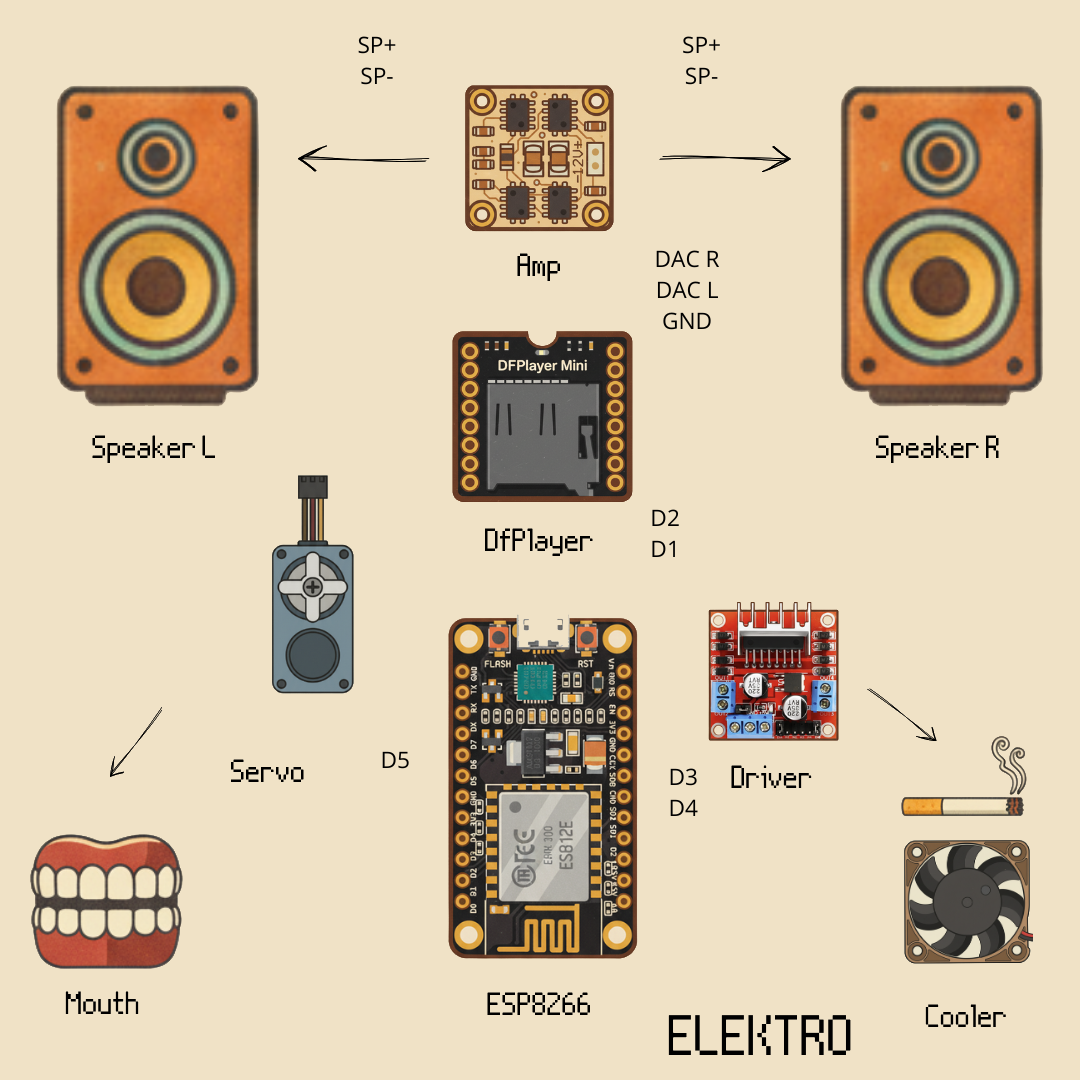
- ESP8266 Amica *
- Motor Driver
- DfPlayer Mini
- Ns4110 20 watts x 2 Amp
- Servo motor *
- 5V Cooler 5V *
- 2 x 20 watts 4 ohms speakers *
- Dual 5v 12v Power Supply from Iomega Zip Drive *
- microSD card
* Recycled parts
Since I usually work on small projects, most of my servos couldn’t move the steel jaw. In a kit I’d received years ago for evaluation, I found a larger servo with metal gears. I 3D-printed a mount and screwed it in, drilling into the base of the head. I attached the jaw to the servo with two crossed wires and tested the maximum opening angles from the software.
To give Elektro a voice and sounds, I connected a DFPlayer Mini to the ESP, sending the DFPlayer’s DAC output to an NS4110 stereo amplifier (2×18 watts). The amplifier then drove two 20-watt, 4-ohm speakers salvaged from a home theater system. Since everything had to fit inside the head, I positioned the speakers pointing to the sides so they wouldn’t interfere with the jaw’s movement.
I wrote a function to move the jaw during audio playback, which required modifying the isACK parameter during DFPlayer initialization:
if (player.begin(mySerial, /*isACK = */true, /*doReset = */true))For voice generation, I chose the Josh voice from Eleven Labs. During testing, I realized the volume wouldn’t be enough for the usual conference noise, so I edited the audio in Audacity, compressing it and boosting the volume.
The SmokerAlthough it would have been possible to just leave the cigarettes burning in the mouth, I wanted to add a touch of sophistication. I came up with the idea of drawing the smoke using a 5V fan running in reverse, controlled by a motor driver. I designed the funnel in Fusion 360, 3D-printed it on the Bambu Lab A1 Mini, fitted it onto the fan, connected the fan to the driver, and wrote functions to coordinate jaw movements with puffs and coughing sounds.
While it works, the funnel design could be improved to achieve better airflow for the smoke.
The Hole in the ChestThe hole in Elektro’s chest was meant to show that there wasn’t a person inside—a sensible precaution if you consider the robot’s size and the fact that hiding humans in machines wasn’t unheard of back in the day (see the case of the Mechanical Turk). We decided to install two retro lamps there, and in the future we plan to control them via the ESP8266 using a relay module.
Although Elektro behaves autonomously, I wanted to allow remote commands, so I set up an Access Point on the ESP8266. By entering the password and loading the admin IP, the Elektro menu appears with the following options: speak, mute, smoke, cough.
The speak button makes Elektro talk. Even if the button isn’t pressed for a while, Elektro still speaks, rotating announcements with random phrases.
The smoke option opens the mouth, leaving a pause to place and light the cigarette. Then he starts smoking, drawing with the fan and pausing at intervals. Occasionally he coughs to complete the effect.
The mute/unmute button allows silencing Elektro, which was useful since I wasn’t sure of his placement at the conference site.
Completely unnecessary, but oddly important, I also embedded a vintage illustration of Elektro in the Access Point interface. It had to be converted to base64 and embedded directly into the code.
Elektro uses 5 volts for the ESP8266, the DFPlayer, and the smoker’s fan. At the same time, he needs 12 volts to get the full power out of the NS4110 amplifier. Digging through my drawers, I found a dual-output power supply from an old Iomega Zip drive—a mid-90s temporary storage system—which conveniently provided exactly 5V and 12V. I cut the connector, adapted some terminal blocks, and this 30-year-old supply sprang back to life.
ImprovementsWe reached the conference date under tight deadlines. Still, the plan is to keep improving Elektro—making him look closer to the original in aesthetic details, cloning the original voice and adding a few more functions on the electronics side.
This version of Elektro was brought to life by Roni Bandini and Mauro De Giuseppe, with the help of the young students from EPS School No. 1 in General Las Heras, Buenos Aires, Argentina. He stands around 6.11 feet tall, weighs about 176 pounds, and is crafted mostly from recycled metals and salvaged electronics.
Visitors to CC Konex for the Nerdearla conference will encounter this ever-evolving, never-quite-finished project—a celebration of technological nostalgia and maker ingenuity.

_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments