

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Best & Fast PCB Supplier (2$ for 10 PCBs) https://jlcpcb.com
A proximity sensor is a sensor able to detect the presence of nearby objects without any physical contact. A proximity sensor often emits an electromagnetic field or a beam of electromagnetic radiation (infrared, for instance), and looks for changes in the field or return signal.
Concepts of Line FollowerThe concept of working as a line follower is related to light. We use here the behavior of light on a black-and-white surface. When light fall on a white surface it is almost fully reflected and in the case of a black surface light is completely absorbed. This behavior of light is used in building a line follower robot.
In this Arduino-based line follower robot we have used IR Transmitters and IR receivers also called photodiodes. They are used for sending and receiving light. IR transmits infrared lights. When infrared rays fall on the white surface, it’s reflected and cached by photodiodes which generate some voltage changes. When IR light falls on a black surface, light is absorbed by the black surface and no rays are reflected, thus photodiode does not receive any light or rays.
Here in this Arduino line follower robot when the sensor senses a white surface then Arduino gets 1 as input and when senses a black line Arduino gets 0 as input.
Circuit ExplanationThe whole Arduino line follower robot can be divided into 3 sections: sensor section, control section, and driver section.
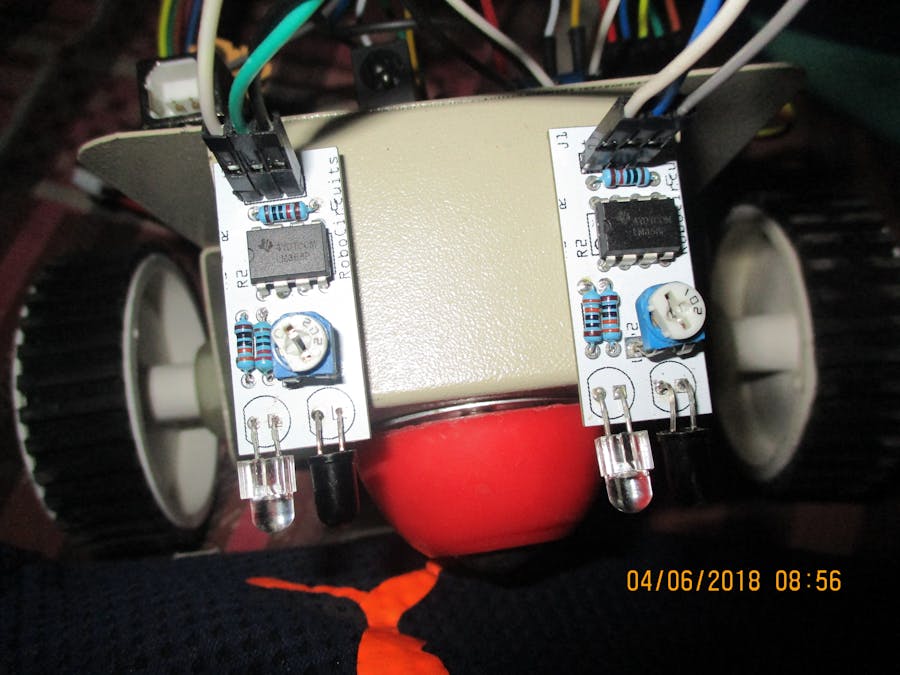
Sensor section:
This section contains IR diodes, potentiometers, comparators (Op-Amp), and LED. Potentiometer is used for setting reference voltage at the comparator’s one terminal and IR sensors are used to sense the line and provide a change in voltage at the comparator’s second terminal. Then the comparator compares both voltages and generates a digital signal at the output. Here in this line follower circuit, we have used two comparators for two sensors. LM 358 is used as a comparator. LM358 has inbuilt two low-noise Op-amps.
Working of Line Follower Robot using ArduinoWorking of a line follower is very interesting. Line follower robot senses black line by using a sensor and then sends the signal to Arduino. Then Arduino drives the motor according to the sensors' output.
Here in this project, we are using two IR sensor modules namely the left sensor and the right sensor. When both the left and right sensor senses white the robot moves forward.
If the left sensor comes on a black line then the robot turns left side.
If the right sensor sense the black line then the robot turns right side until both sensors come to the white surface. When the white surface comes robot starts moving on forward again.
If both sensors come on a black line, the robot stops.
How to make a Line Follower Robot with Arduino
Website - https://robocircuits.com
Facebook - https://facebook.com/Robocircuits
Instagram - https://Instagram.com/Robocircuits
Twitter - https://Twitter.com/Robocircuits



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments