Related to recent events, a solution to covid-19 problem could be a contactless doorbell. The doorbell is a surface that is touched very often, and with this contactless doorbell we wanted to reduce the risk of infection with any kind of potential virus.
How it works:
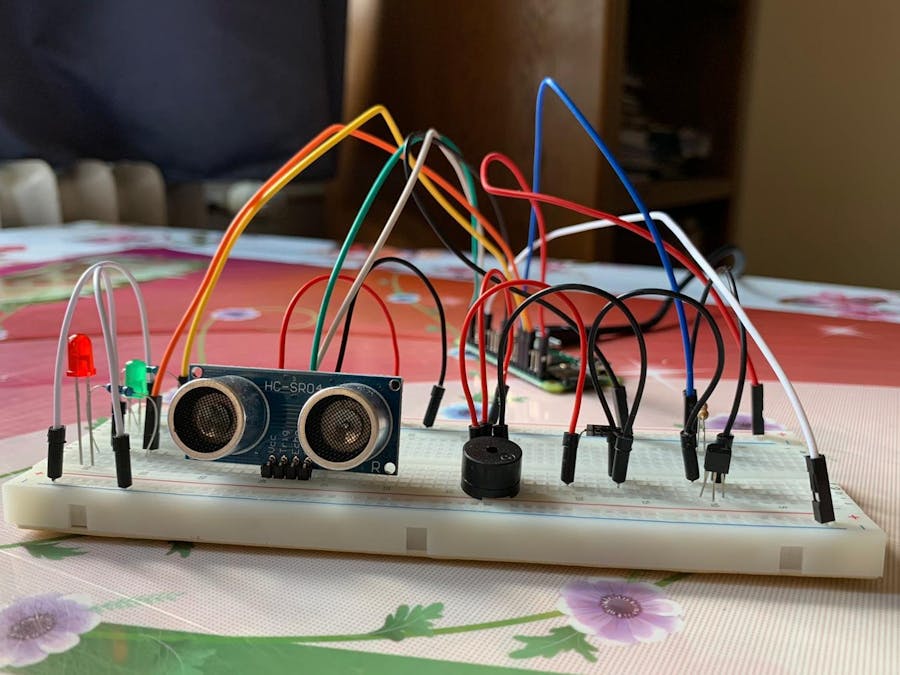
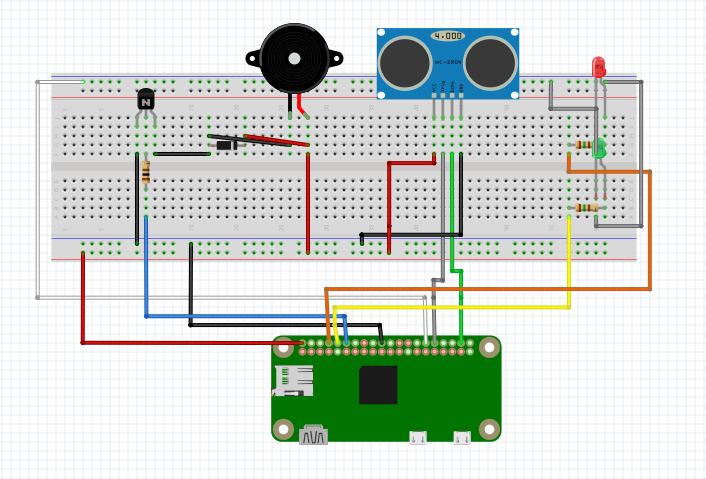
When we approach our hand to the sensor, the buzzer will make some noise, so we can hear that someone rings. Also, we have 2 LED's. The green one is on when there is no visitor, while the red one is off. When a visitor approach his hand to the sensor, the green LED is off and the red one is on. Also, when we approach our hand to the sensor, an email will be sent to a specific email address with content "You have a visitor". When the visitor left, another email will be sent to the same email address with content "The visitor left!"
Below is a video with how the system works.
.And here, we can see that we receive email's when someone come, or someone leave.

















{kind=link}
Comments