


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 8 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
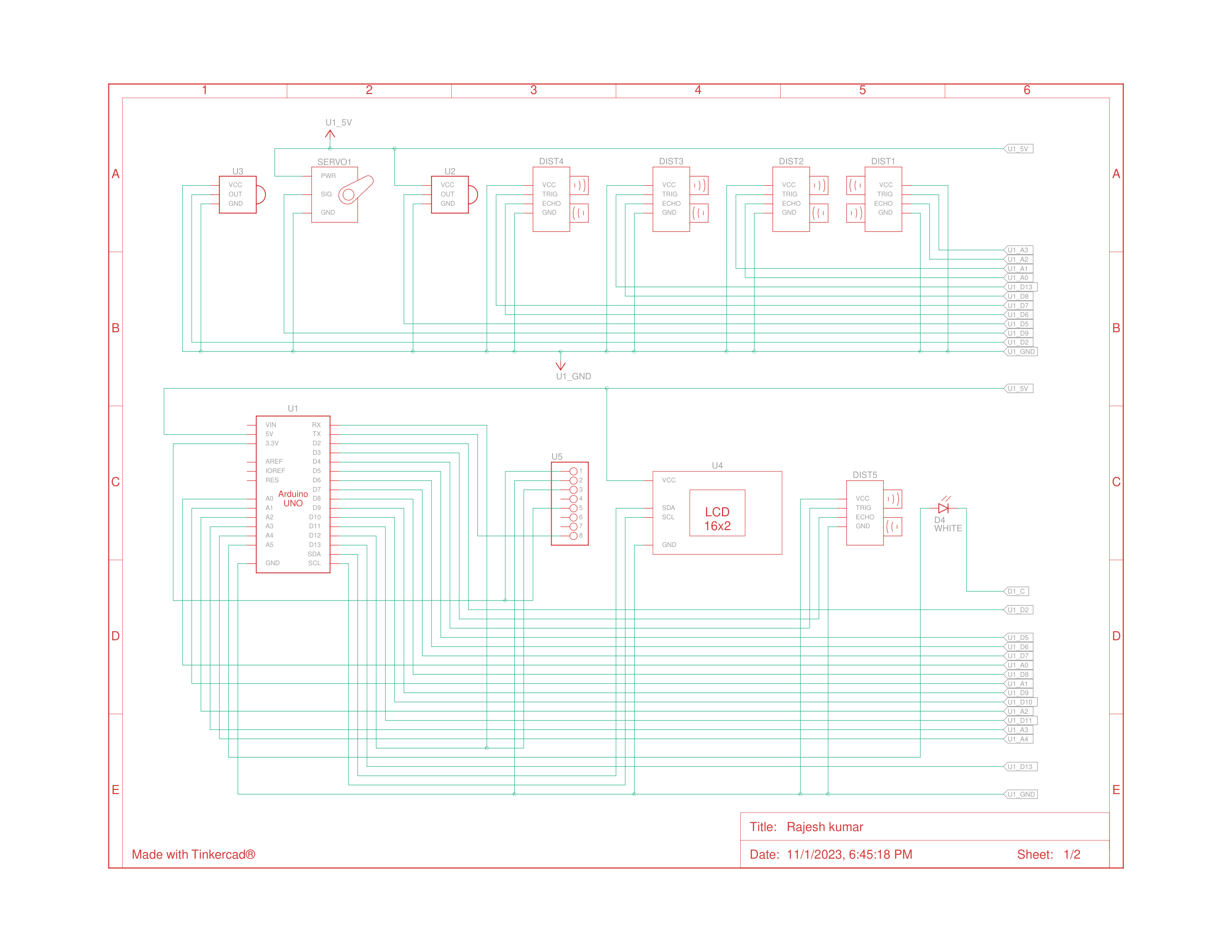
An Advanced and smart Parking System utilizing Arduino Mega, ultrasonic sensors, and ESP8266 has been developed to efficiently manage a parking lot with 10 spaces. The Arduino Mega serves as the central control unit, orchestrating the interaction between the ultrasonic sensors and the ESP8266 module. Ultrasonic sensors are strategically placed in each parking space to detect the presence or absence of vehicles.
The ultrasonic sensors utilize sound waves to measure the distance between the sensor and the vehicle, providing accurate and real-time occupancy information. This data is then transmitted to the Arduino Mega for processing. The ESP8266 module, equipped with Wi-Fi capabilities, enables wireless communication between the parking system and a central monitoring station.
A user-friendly interface can be implemented, allowing drivers to check the availability of parking spaces in real-time through a dedicated mobile app or a web-based platform. The system can also incorporate smart features, such as notifying users about available parking spaces and guiding them to the optimal location within the parking lot.
In addition to efficient parking space utilization, the Advanced & Smart Parking System promotes sustainability by reducing unnecessary fuel consumption and emissions associated with searching for parking spaces. The integration of Arduino Mega, ultrasonic sensors, and ESP8266 exemplifies a cost-effective and scalable solution for managing parking facilities with enhanced precision and convenience.
Idea about making this Project: -- Efficient Space Utilization: The goal of such a system is to optimize the utilization of parking spaces. By implementing smart technologies, you can reduce the time spent by drivers searching for available parking spots and minimize congestion in parking lots.
- Resource Conservation: Smart parking systems contribute to resource conservation by reducing fuel consumption and emissions associated with circling a parking lot in search of a space. This aligns with environmental sustainability goals.
- Technological Innovation: Building a parking system with Arduino Mega, ultrasonic sensors, and ESP8266 showcases technological innovation. It allows enthusiasts or developers to explore the capabilities of these devices and learn more about the integration of hardware and software.
- User Convenience: The system provides a convenient way for users to check parking space availability in real-time through a mobile app or web interface. This can enhance the overall user experience and make parking more convenient.
- Data Insights: By collecting and analyzing data on parking space occupancy, the system can offer valuable insights for future planning and decision-making. For example, trends in parking demand can inform the expansion or optimization of parking facilities.
- Education and Learning: Creating such a system can serve as a valuable educational project. It allows individuals, especially students and hobbyists, to gain hands-on experience in electronics, programming, and IoT (Internet of Things) technologies.
- Demonstration of IoT Concepts: The integration of the ESP8266 module demonstrates the concept of IoT by enabling wireless communication between the parking system and a central monitoring station. This showcases the potential of connected devices in real-world applications.
Ultimately, the decision to create an Advanced & Smart Parking System may stem from a combination of environmental concerns, a desire for technological exploration, and a commitment to improving user experiences in parking facilities.
The list of components and Prototype of system is given as: -1. Arduino Mega 2560 R3The Arduino Mega 2560 is an open-source microcontroller board based on ATmega2560. Along with this, it also has 54 digital I/O pins, 16 Analog Inputs, 4 UARTs, ICSP Header, 16 MHz Crystal Oscillator, a reset button, USB port, and a DC Power Jack. It is designed for projects which require more I/O lines, more sketch memory, and more RAM. It is best suited for Robotics, 3D printers, RC planes, etc. projects which require many sensors with different communication protocols and actuators to work in tandem. It gets programmed with the help of Arduino IDE and you do not need to attach any other components to program them. Its uses include in DIY projects, IoT based projects, Robotics, Prototyping for Electronic components and systems. The Arduino Microcontroller boards such as Arduino UNO, Arduino Nano, Arduino Leonardo, Arduino Pro Mini have revitalized the Automation Industry with their sheer simplicity and easy to use interface.
2. ESP-01 ESP8266-01 WiFi Transceiver Module: -The ESP8266-01 is a low cost and user-friendly device to provide internet connectivity to your projects. This module can be used as a Wi-Fi hotspot or can connect to any WI-Fi network. We use this module to make our projects IoT enabled and gather and process the data easily. The ESP-01 can also fetch data from the internet and it can be used in your project. Its most important feature is that it can be programmed with Arduino IDE, which makes it a lot more user friendly. One drawback of this module is that it only has two GPIO pins, so you have to use it along with another controller like Arduino, or go for other modules like NodeMCU, ESP-12, or ESP-32. It finds uses in Portable Electronics, Robotics, Home Automation, Wireless Data Logging, etc.
3. Ultrasonic Sensor Module - HC-SR04: -The Ultrasonic Sensor uses Ultrasonic waves to determine the distance of an object like Bats, hence it can be used as a distance measuring sensor. There are two Ultrasonic Transducers present in which one acts as a Transmitter which transmits a high frequency Ultrasonic signal and other acts as a receiver which will wait for the receiving of echo signal which gets reflected by any object in its path. The time between the two signals when divider by speed of sound gives us the distance of the object. Theoretically the sensor claims to have a measuring distance of 2cm to 400cm. However, a range up to 75-80cm can be easily achieved practically. They are cheap, easy to interface and require low power to operate. They can be used to measure the depth of water as waves can travel in water, detect and avoid obstacles in the path of a robot and also as a parking assist sensor.
4. 20x4 Graphical LCD 2004A: -LCD modules are very commonly used in most embedded projects, the reason being its cheap price, availability, and programmer-friendly. Most of us would have come across these displays in our day to day life, either at PCO’s or calculators. Alphanumeric Graphical LCD (2004A) is a 20x4 Blue/Green Coloured Liquid Crystal Display. It can display 4 lines of text and each line can have up to 20 characters in it, which is bigger than the 16x2 LCD display but the programming is almost same. These characters can either be text, numbers, graphical symbols or even custom characters. It can be used in DIY projects, to display the data on IoT projects, etc.
Software About ThingSpeak:-ThingSpeak is a robust Internet of Things (IoT) platform designed for efficient data management and analysis. With ThingSpeak, users can seamlessly collect and store data from a variety of IoT devices and sensors. The platform organizes data into channels, each comprising multiple fields that can accommodate diverse types of information. For instance, fields may be designated for temperature, humidity, pressure, or any other relevant data.
One of ThingSpeak's strengths lies in its visualization capabilities, allowing users to create charts, graphs, and maps to interpret and understand data trends effectively. The platform also supports reactions, enabling users to set up automated responses based on specific data conditions. This can include triggering notifications, tweets, or other actions, enhancing the platform's utility in real-time monitoring and control applications.
ThingSpeak fosters easy integration with popular IoT devices such as Arduino, Raspberry Pi, and ESP8266 through its accessible APIs, enabling seamless data transmission to ThingSpeak channels. Additionally, the platform's open-source nature, based on MATLAB, provides flexibility for customization according to user requirements.
With an active community and extensive documentation, ThingSpeak caters to a diverse user base. It offers both free and paid plans, with the former providing fundamental features and the latter unlocking advanced functionalities and higher data storage capacities. Whether for hobbyist projects or industrial applications, ThingSpeak stands as a comprehensive and accessible solution for IoT data management and analysis.
Working: -The Advanced & Smart Parking System utilizing Arduino Mega, ultrasonic sensors, and ESP8266 operates through a series of coordinated steps to efficiently manage a parking lot with 10 spaces:
- Ultrasonic Sensor Detection: Ultrasonic sensors are installed at each parking space to detect the presence or absence of vehicles. These sensors use ultrasonic waves to measure the distance between the sensor and the nearest obstacle, which in this case is a vehicle.
- Data Collection: The ultrasonic sensors continuously collect data regarding the occupancy status of each parking space. When a vehicle enters or exits a parking space, the corresponding sensor detects the change in distance and signals the Arduino Mega.
- Arduino Mega Processing: The Arduino Mega serves as the central processing unit for the parking system. It receives data from all the ultrasonic sensors and processes this information to determine the real-time occupancy status of each parking space.
- Communication with ESP8266: Once the Arduino Mega has processed the data, it communicates with the ESP8266 module. The ESP8266 is equipped with Wi-Fi capabilities, allowing it to establish a wireless connection with a central monitoring station or a user interface.
- Wireless Transmission: The Arduino Mega sends the occupancy data to the ESP8266, which wirelessly transmits this information to a central server or a cloud-based platform. This enables remote monitoring and management of the parking spaces
- User Interface: A user-friendly interface, such as a mobile app or a web-based platform, allows users to access real-time information about parking space availability. Drivers can check the status of the parking lot before arriving and make informed decisions about where to park.
- Central Monitoring: The central monitoring station, connected to the cloud or server, can keep track of parking space occupancy, trends, and system health. This information can be used for analytics and to improve the efficiency of the parking management system.
By integrating these components and functionalities, the Advanced & Smart Parking System provides an intelligent and responsive solution for optimizing parking space utilization while offering a seamless experience for users.
To create a channel on ThingSpeak, follow these steps: -To create a channel on ThingSpeak, follow these steps: -
To create a channel on ThingSpeak, follow these steps: -- Sign Up or Log In: If you don't have a ThingSpeak account, go to the ThingSpeak website (https://thingspeak.com/) and sign up for a new account. If you already have an account, log in using your credentials.
- Navigate to Channels: After signing in, click on the "Channels" tab in the top navigation bar.
- Create a New Channel: On the Channels page, click the "New Channel" button
- Fill in Channel Information: Fill in the required information for your new channel: Name: Give your channel a descriptive name. Description: Provide a brief description of your channel. Field 1, Field 2, etc.: These fields represent the data fields for your channel. You can use them to store different types of data.
- Advanced Settings (Optional): You can configure advanced settings for your channel, such as the type of data, privacy settings, and more. Adjust these settings according to your requirements.
- Save Channel: Click the "Save Channel" button to create your channel.
- Get API Key: After creating the channel, go to the "API Keys" tab to obtain your Write API Key. This key is needed to update data on your channel.
Now, you have successfully created a ThingSpeak channel. You can start sending data to this channel using devices like Arduino, Raspberry Pi, or any other IoT device that supports ThingSpeak integration.
Remember to keep your Write API Key secure and not share it publicly. This key is used to write data to your channel, and sharing it could potentially compromise your channel's security and privacy.









{kind=link}
{kind=link}
Comments