/*
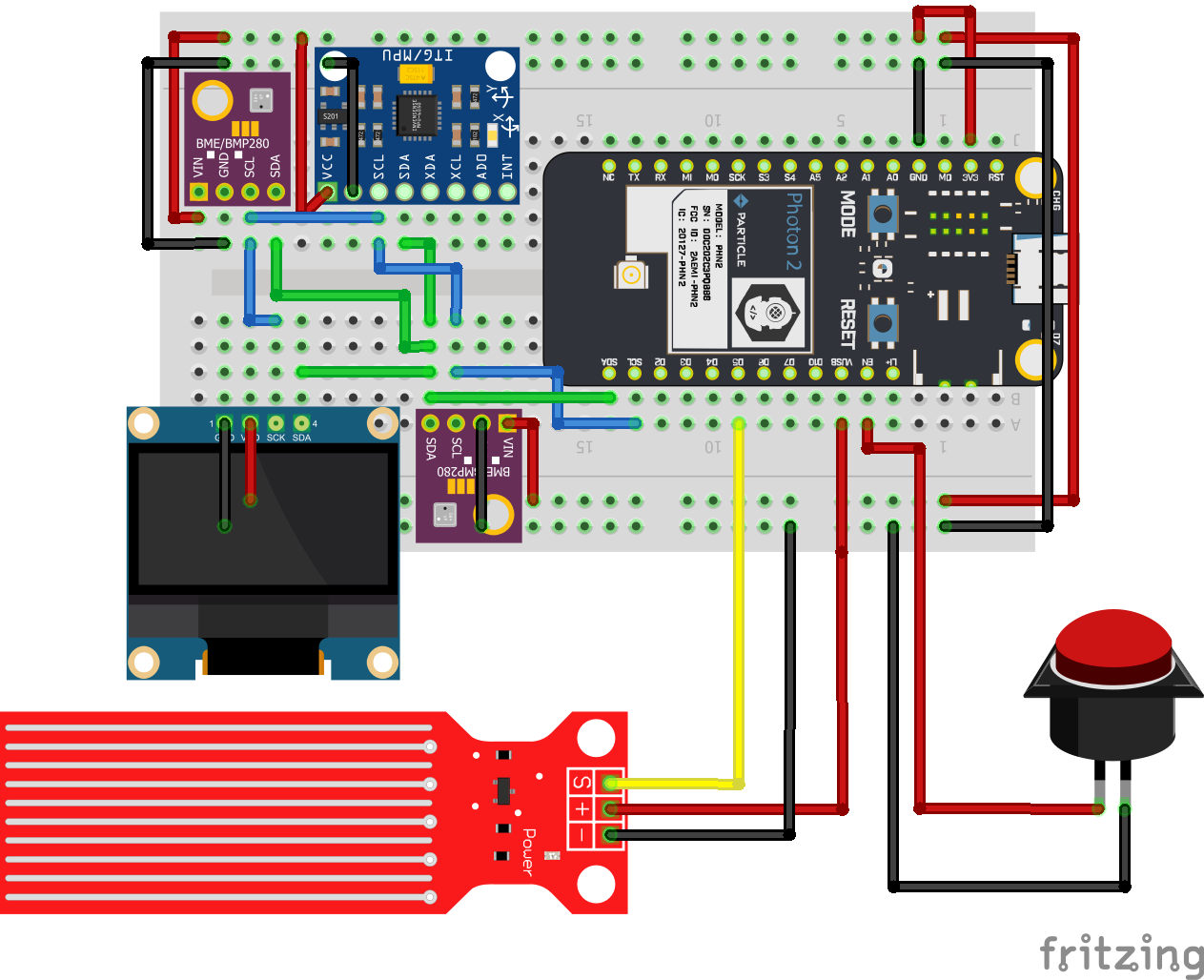
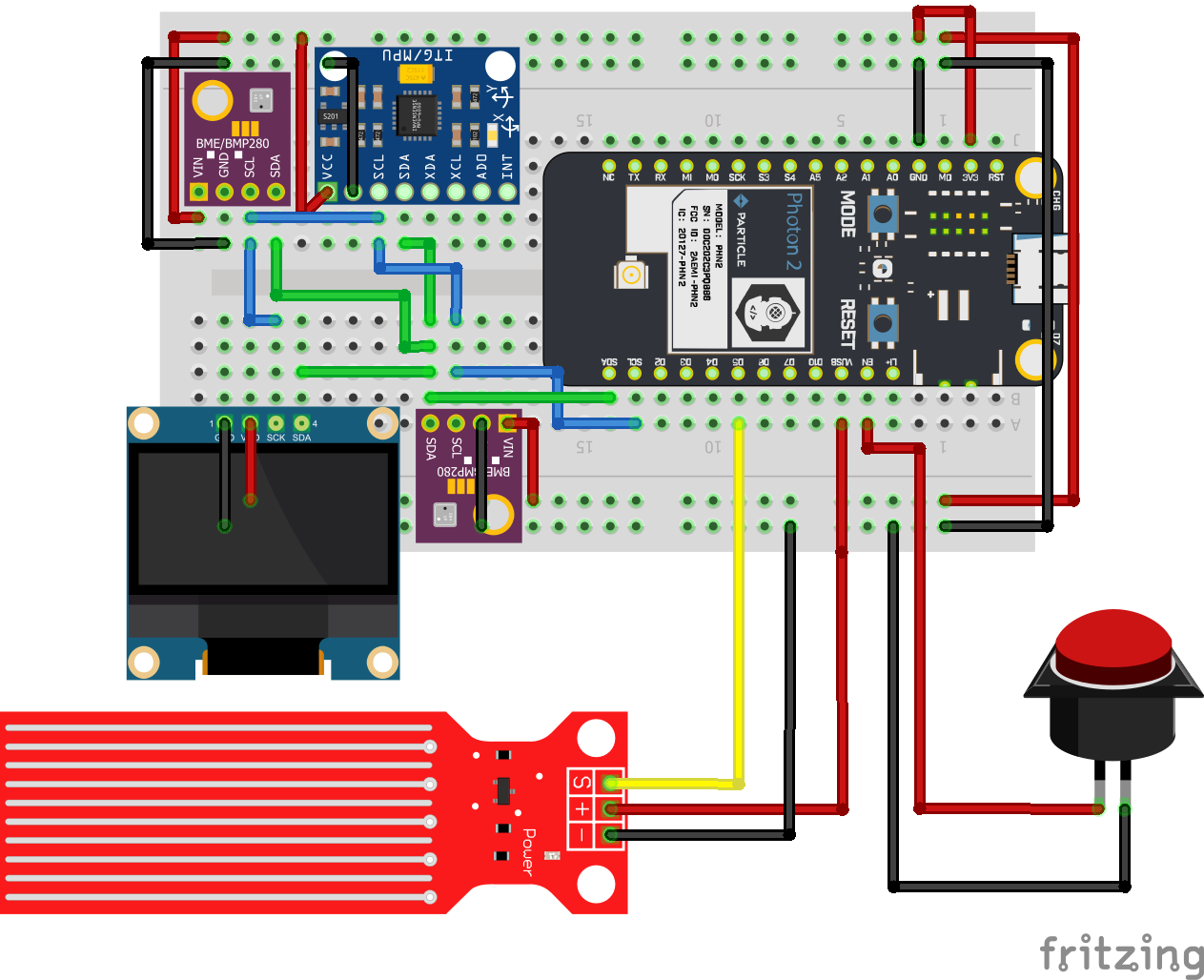
* Project Capstone Smart Bag
* Author: Phylicia Bediako
* Date: 8/4/25
* For comprehensive documentation and examples, please visit:
* https://docs.particle.io/firmware/best-practices/firmware-template/
*/
// Include Particle Device OS APIs
#include "Particle.h"
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
#include "IoTTimer.h"
#include "credentials.h"
#include "Adafruit_MQTT.h"
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
#include "Adafruit_BME280.h"
//I2C Device addresses
// I2c device found at address 0x3C - OLED
// I2c device found at address 0x68 - MPU
// I2c device found at address 0x76 - BME1 (outer)
// I2c device found at address 0x77 - BME2 (inner)
//Adafruit Publishing
TCPClient TheClient;
Adafruit_MQTT_SPARK mqtt(&TheClient,AIO_SERVER,AIO_SERVERPORT,AIO_USERNAME,AIO_KEY);
Adafruit_MQTT_Publish inTemp = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.insidebagtemp");
Adafruit_MQTT_Publish outTemp = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.outsidebagtemp");
Adafruit_MQTT_Publish leak = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.leakindicator");
Adafruit_MQTT_Publish tempMsg = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.tempstatusmsg");
Adafruit_MQTT_Publish dzTimeMins = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.dangerzonemins");
Adafruit_MQTT_Publish hiDzTimeMins = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.hidangerzonemins");
Adafruit_MQTT_Publish bagShake = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.bagshakeindicator");
Adafruit_MQTT_Publish fallLean = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/iotcapstone.bagfallleanindicator");
void MQTT_connect();
bool MQTT_ping();
unsigned int lastPubTime, lastPubTime2; //maybe for printing at regular intervals?
//Water Sensor
const int WATERSENSOR=D5; //is more responsive at 5V than 3.3V
int waterVal;
const char* waterMsg;
bool waterChange;
//BME Variables
float inTempC,inTempF,outTempC,outTempF;
const char DEGREE=0xF8;
const char PCT=0x25;
const int OUTBME280=0x76;
const int INBME280=0x77;
bool statusOut, statusIn;
int dangerZone;
Adafruit_BME280 bmeInner;
Adafruit_BME280 bmeOuter;
float dangerTimeMins, hiDangerTimeMins, dangerTimeSec, hiDangerTimeSec;
const char* dangerMsg;
//OLED
const int OLED_RESET=-1;
Adafruit_SSD1306 display(OLED_RESET);
const int OLEDADDR=0x3C;
int lastDisplayTime;
//MPU
const int MPU_ADDR=0x68;
byte accel_x_h, accel_x_l;
byte accel_y_h, accel_y_l;
byte accel_z_h, accel_z_l;
int16_t accel_x, accel_y, accel_z;
float accelXG, accelYG, accelZG, accelXGSq, accelYGSq,accelZGSq, aTot;
float pitchDeg, pitchRad, rollDeg, rollRad, toppleDeg, toppleRad;
const float CONVFACTOR= 0.0000612061;
int leanTopple, shakerCount;
bool bagShaken;
const char* shakeMsg;
//Timer
IoTTimer tempDangerTimer, hiTempDangerTimer, shakenTimer;
// Let Device OS manage the connection to the Particle Cloud
SYSTEM_MODE(AUTOMATIC);
/*********************************************************************/
/*********************************************************************/
void setup() {
Serial.begin(9600);
waitFor(Serial.isConnected,10000);
Wire.begin();
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6B);
Wire.write(0x00);
Wire.endTransmission(true);
WiFi.on();
WiFi.connect();
while(WiFi.connecting()) {
Serial.printf(".");
}
Serial.printf("\n\n");
statusOut = bmeOuter.begin(OUTBME280);
if (statusOut == false){
Serial.printf("OuterBME280 at address 0x%02x failed to start",OUTBME280);
}
statusIn = bmeInner.begin(INBME280);
if (statusIn == false){
Serial.printf("InnerBME280 at address 0x%02x failed to start",INBME280);
}
display.begin(SSD1306_SWITCHCAPVCC,OLEDADDR);
display.display();
pinMode(WATERSENSOR,INPUT);
}
/*********************************************************************/
/*********************************************************************/
void loop() {
MQTT_connect();
MQTT_ping();
inTempC=bmeInner.readTemperature();
inTempF=(inTempC*1.8)+32;
outTempC=bmeOuter.readTemperature();
outTempF=(outTempC*1.8)+32;
waterVal=digitalRead(WATERSENSOR);
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR,6,true);
//Danger Zone Var's
//Safe zone
if ((inTempF <= 35) || (inTempF >= 150)){
dangerZone = 0;
dangerMsg = "Safe Zone Temp";
}
//Caution Zone
if (((inTempF > 35) && (inTempF < 40)) || ((inTempF > 140) && (inTempF < 150))){
dangerZone = 1;
dangerMsg = "Caution Zone Temp";
}
//Danger Zone- Reg Temp Outside
if ((inTempF >= 40) && (inTempF <= 140) && (outTempF < 90)){
dangerZone=2;
dangerMsg = "Danger Zone Temp";
}
if ((dangerZone == 2)){
dangerTimeSec = millis()/1000.0;
dangerTimeMins = (dangerTimeSec/60.0);
if((dangerTimeMins > 999)){
dangerTimeMins = 999;
}
}
//Danger Zone- High Temp Outside
if (((inTempF >= 40) && (inTempF <= 140)) && (outTempF >=90)) {
dangerZone=3;
dangerMsg = "HiTemp Danger Zone";
}
if ((dangerZone == 3)){
hiDangerTimeSec = millis()/1000.0;
hiDangerTimeMins = (hiDangerTimeSec/60.0);
if((hiDangerTimeMins > 999)){
hiDangerTimeMins = 999;
}
}
Serial.printf("Danger (mins) %.0f HiDanger (mins) %.0f\n",dangerTimeMins,hiDangerTimeMins);
//Spill-Leak Detection
if ((waterChange =! waterChange)){
if ((waterVal == 0)){
waterMsg = "No spills detected";
}
else{
waterMsg = "Possible spill";
}
}
//Accelerometer Pt 1- Topple Detector
accel_x_h = Wire.read();
accel_x_l = Wire.read();
accel_y_h = Wire.read();
accel_y_l = Wire.read();
accel_z_h = Wire.read();
accel_z_l = Wire.read();
accel_x = accel_x_h<<8 | accel_x_l;
accel_y = accel_y_h<<8 | accel_y_l;
accel_z = accel_z_h<<8 | accel_z_l;
pitchRad = -asin(accelXG);
pitchDeg = (360/(2*M_PI)) * pitchRad;
rollRad = atan2(accelYG,accelZG);
rollDeg = (360/(2*M_PI)) * rollRad;
//Measuring roll
accelXG= (CONVFACTOR * accel_x);
accelYG= (CONVFACTOR * accel_y);
accelZG= (-CONVFACTOR * accel_z);
toppleDeg = (360/(2*M_PI)) * pitchRad;
if ((toppleDeg <= -75)){
leanTopple=0; //Standing
}
if ((toppleDeg > -75) && (toppleDeg <= -65 )){
leanTopple=1; //Leaning
}
if ((toppleDeg > -65)){
leanTopple=2; //Falling
}
//Serial.printf("Topple Degrees: %.0f, Fall Status: %i\n", toppleDeg,leanTopple);
//Accelerometer Pt 2- Shaken Goodies Detector (use code like the shock assignment)
accelXGSq=pow(accelXG,2);
accelYGSq=pow(accelYG,2);
accelZGSq=pow(accelZG,2);
aTot=sqrt(accelXGSq + accelYGSq + accelZGSq);
if((aTot > 2.2 )){
shakerCount++;
}
if((shakerCount == 5)){
shakenTimer.startTimer(7000);
bagShaken = 1;
}
if ((bagShaken==1)){
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,48);
display.setRotation(2);
display.printf("CONTENTS SHAKEN!");
if((shakenTimer.isTimerReady())){
bagShaken = 0;
shakerCount = 0;
}
}
Serial.printf("Total Accel %.01f, Times Shaken %i\n",aTot, shakerCount);
//Publish to Adafruit
if((millis()-lastPubTime)>300000){
if(mqtt.Update()){
inTemp.publish(inTempF); //in-bag temp
outTemp.publish(outTempF); //outside bag temp
tempMsg.publish(dangerMsg); //safe, caution, danger, or hiTemp danger zone
dzTimeMins.publish(dangerTimeMins);
hiDzTimeMins.publish(hiDangerTimeMins);
}
lastPubTime = millis();
}
if((millis()-lastPubTime2)>120000){
if(mqtt.Update()){
leak.publish(waterVal);
bagShake.publish(bagShaken);
fallLean.publish(leanTopple);
}
lastPubTime2 = millis();
}
//Display on OLED
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.setRotation(2);
display.printf("Inner Temp: %.01f %cF\nOuter Temp: %.01f %cF\n%s\nDZ: %.0f of 120m max\nHiDZ: %.0f of 60m max\n%s",inTempF, DEGREE, outTempF, DEGREE, dangerMsg, dangerTimeMins, hiDangerTimeMins, waterMsg);
display.display();
display.clearDisplay();
}
/*********************************************************************/
/*********************************************************************/
void MQTT_connect() {
int8_t ret;
// Return if already connected.
if (mqtt.connected()) {
return;
}
Serial.print("Connecting to MQTT... ");
while ((ret = mqtt.connect()) != 0) { // connect will return 0 for connected
Serial.printf("Error Code %s\n",mqtt.connectErrorString(ret));
Serial.printf("Retrying MQTT connection in 5 seconds...\n");
mqtt.disconnect();
delay(5000); // wait 5 seconds and try again
}
Serial.printf("MQTT Connected!\n");
}
/*********************************************************************/
/*********************************************************************/
bool MQTT_ping() {
static unsigned int last;
bool pingStatus;
if ((millis()-last)>120000) {
Serial.printf("Pinging MQTT \n");
pingStatus = mqtt.ping();
if(!pingStatus) {
Serial.printf("Disconnecting \n");
mqtt.disconnect();
}
last = millis();
}
return pingStatus;
}















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments