

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
The story:
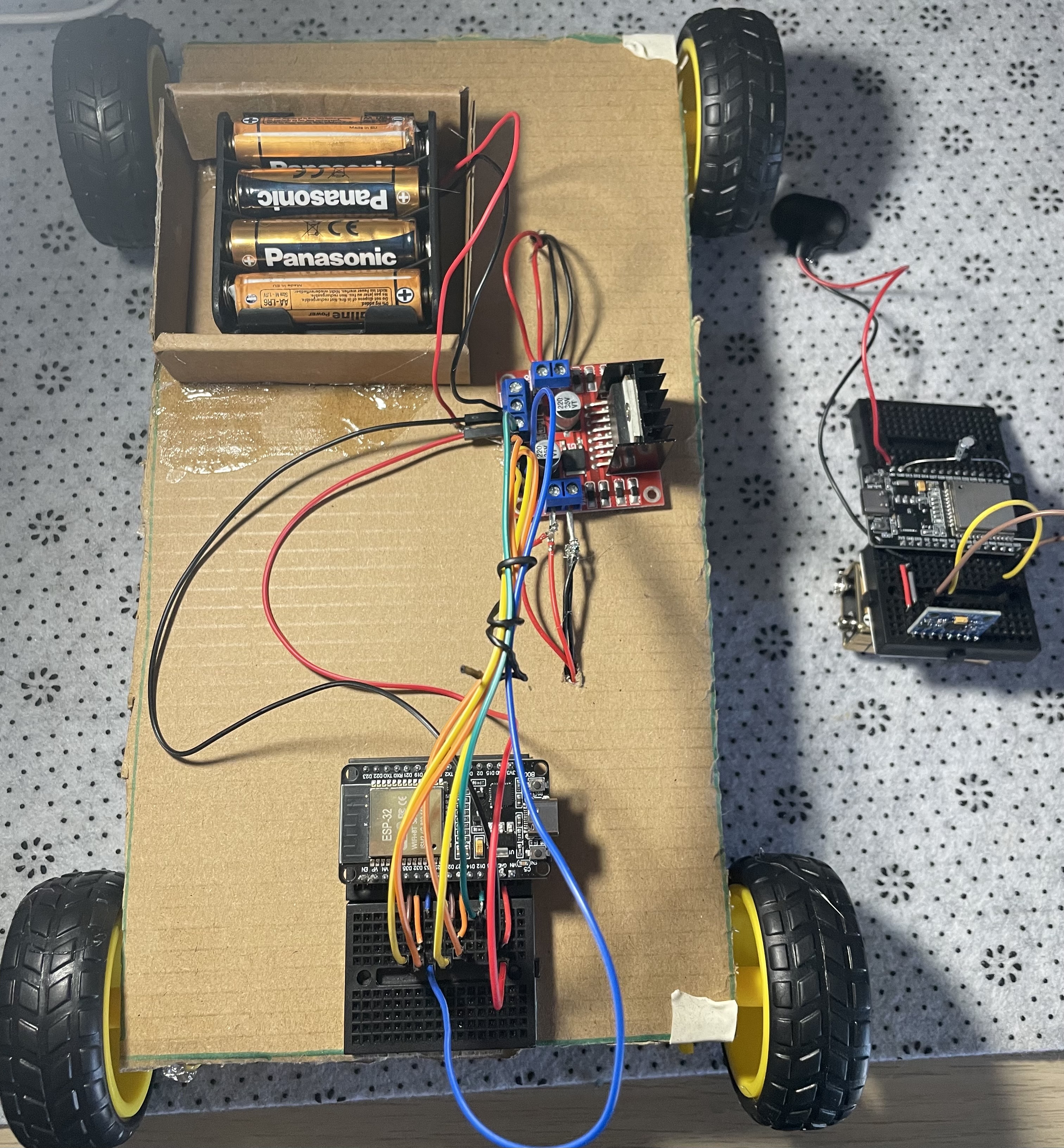
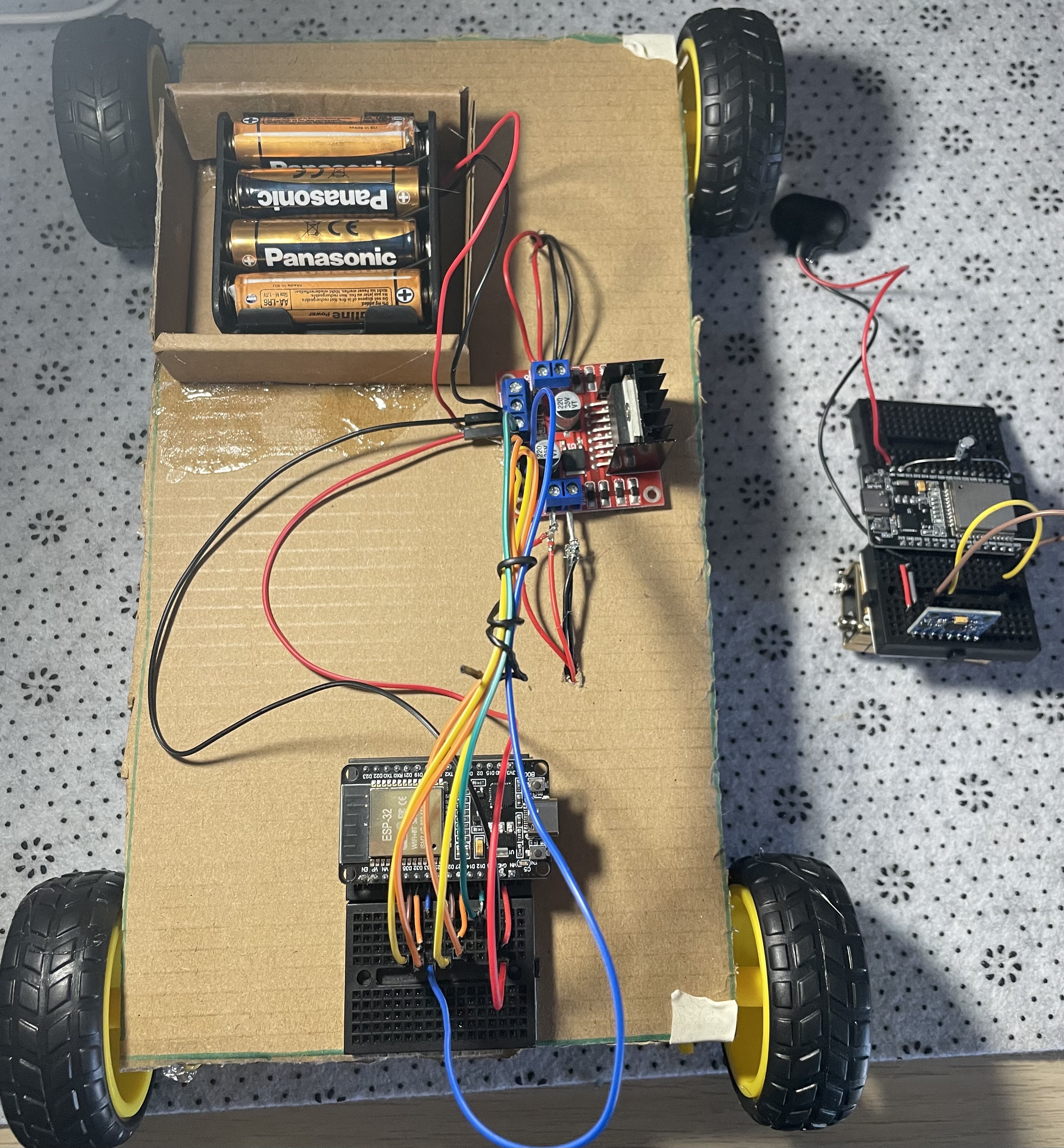
I wanted to make a project about a robotic car since its a good way to get your self used to robotics but I also wanted it to be a bit unique not the standard robotic car that everyone builds so I decided to make it hand controlled.Now to how it works. I used cardboard as the base and put all the materials on it, I used two esp 32s so they can communicate with each other the communication was basically my hand moving (using an mpu 6500) and the robot recieving a message to move. The communication was made using esp now a protocol that allows two esp to "talk" to each other.
Controller and robot schematics
Connections
the controller has to have the following connections as shown by the photo above:
ESP // MPU
3V->VCC
GND -> GND
D21->SDA
D22->SCL
ESP // Battery
VN<-9v+
GND<-9v-
ESP//L298N
VIN->5V
GND->GND(you make this connection only once your code has been uploaded and you have disconected the usb port from the esp 32 )
ENA->D13
IN1->D14
IN2->D27
ENB->D25
IN3->D33
IN4->D32
Motor connections:
Motor//H-bridge
front wheels red wires -> OUT3
front wheels black wires->OUT4
(it doesnt matter how we put the you could do the opposite if you wish)
rear wheels red wires -> OUT2
rear wheels black wires -> OUT1
Battery//L298N
12V+ -> 12V
GND -> GND
the controller has to have the following connections as shown by the photo above:
ESP // MPU
3V->VCC
GND -> GND
D21->SDA
D22->SCL
ESP // Battery
VN<-9v+
GND<-9v-
ESP//L298N
VIN->5V
GND->GND(you make this connection only once your code has been uploaded and you have disconected the usb port from the esp 32 )
ENA->D13
IN1->D14
IN2->D27
ENB->D25
IN3->D33
IN4->D32
Motor connections:
Motor//H-bridge
front wheels red wires -> OUT3
front wheels black wires->OUT4
(it doesnt matter how we put the you could do the opposite if you wish)
rear wheels red wires -> OUT2
rear wheels black wires -> OUT1
Battery//L298N
12V+ -> 12V
GND -> GND







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments