IntroductionSince we watched Star Wars and other sci-fi movies, we always see autonomous robots around us. The overall goal of our project was to make a simple line follower. As a preliminary step, this tutorial will present a simple way to control directions of robot with two potentiometers and several wires.
We are a group of 1st year students at CentraleSupélec Rennes. This work is part of a short-term project we must achieve using our knowledge in electronics, signal processing and so on.
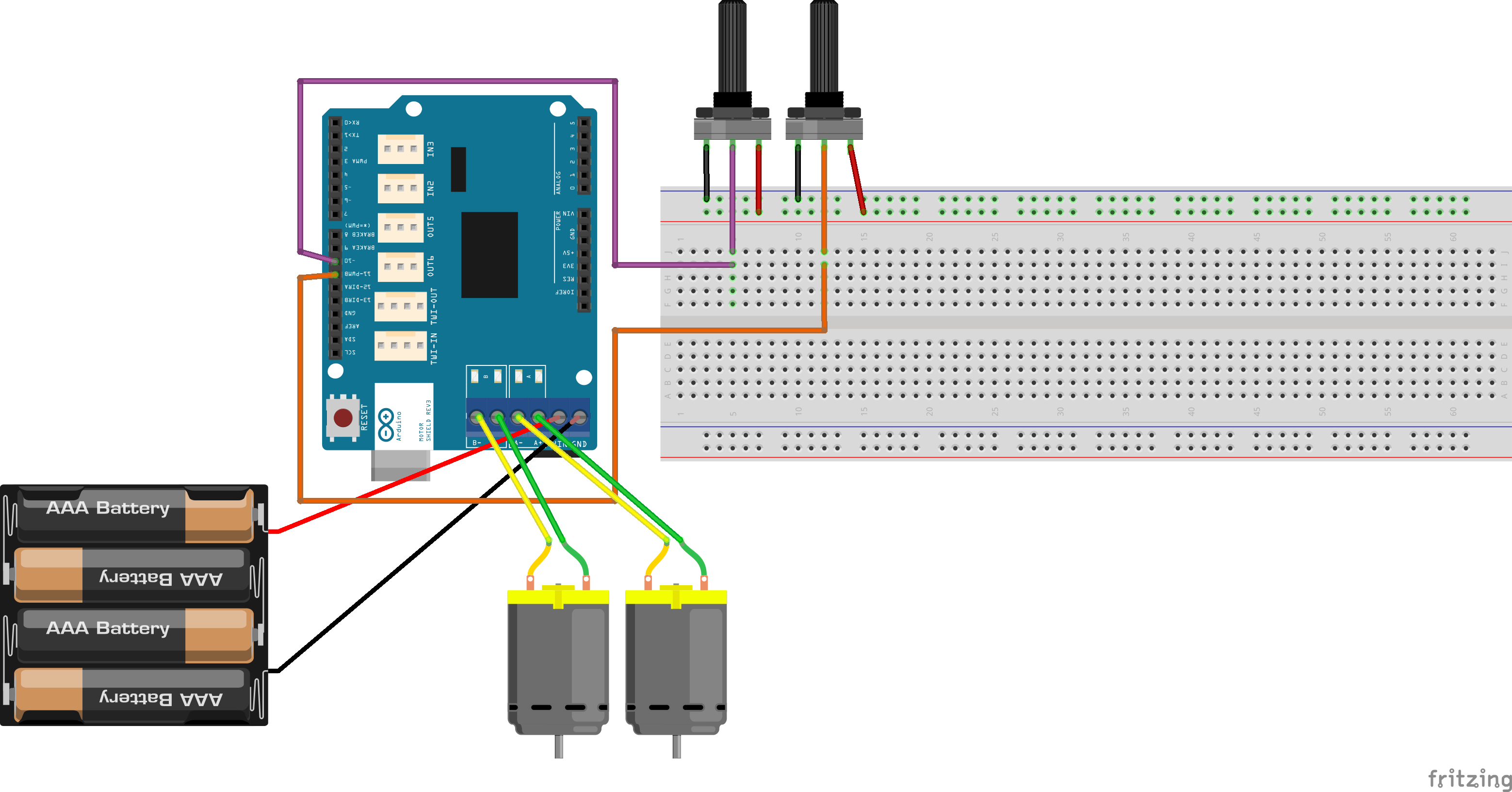
The featuresFor this Hackster tutorial, we will make the robot move according to two potentiometers (one for each wheel):
- Potentiometer value will “decide” of the wheel speed.
- If both potentiometers have the same value, the robot will go straight forward.
- If different values are observed, the robot will turn left/right.
One remark: we decided to use a motor shield as the basic Arduino Uno cannot deliver enough current to control motors. Without this shield, wheels didn’t behave correctly. For the following schematics, we will use the official Arduino motor shield.
PerspectivesFor later applications, there are several perspectives:
- Implementing a wireless connection between the potentiometers and the robot (using NRF24L01 chips).
- For a line follower application, using a sensor such as https://www.pololu.com/product/961. Calibration is quite difficult to do.
- Developing an Android app to communicate with our system (wheels parameters, battery level, etc).
Here is a video of the result:


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




 Pascal Cotret
Pascal Cotret

{kind=link}
Comments