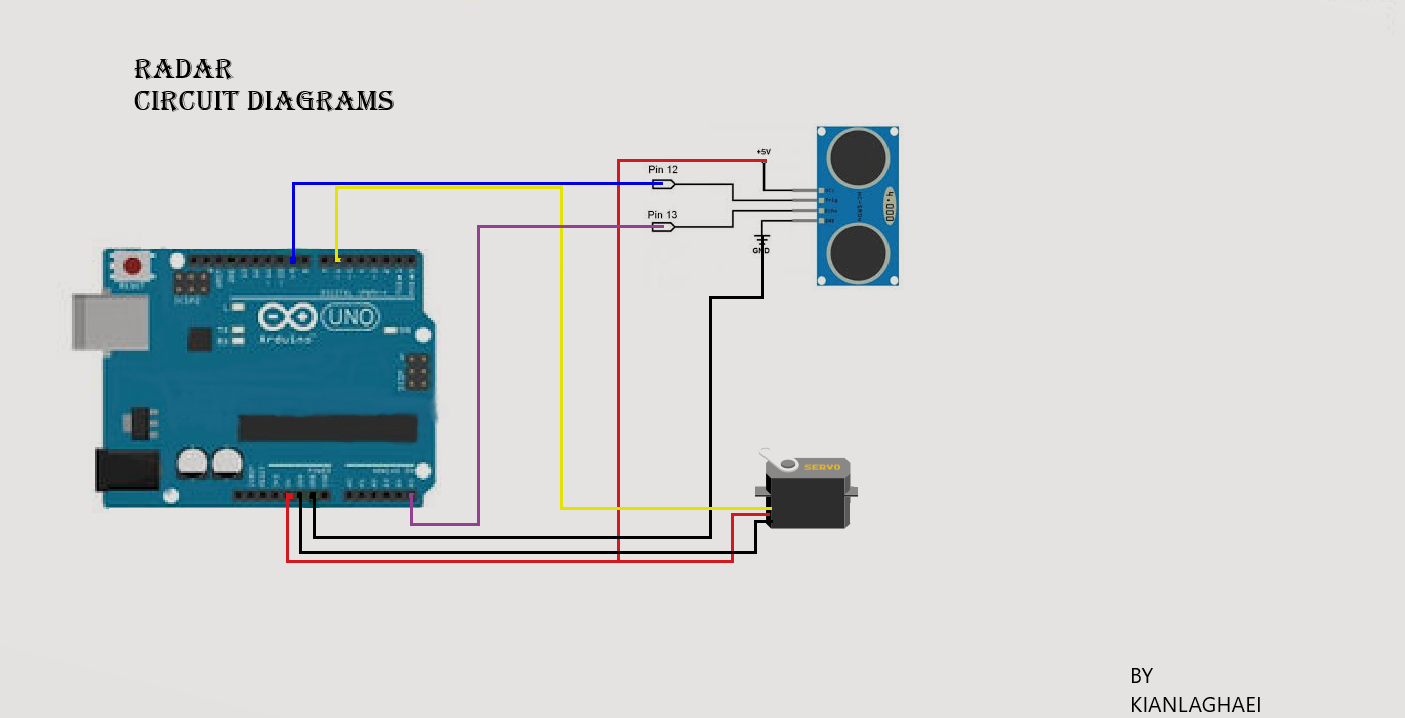
# radar
//TNE PROCESSING CODE:
import processing.serial.*;
Serial port;
int distance;
int derection=1;
void setup()
{
fullScreen();
smooth();
port = new Serial(this, "COM3", 115200);
port.clear();
frameRate(10);
delay(500);
background(0);
}
void draw()
{
noStroke();
fill(0);
rect(0, 0, 350, 150);
distance = port.read();
port.write(angle);
drawRadar();
drawText();
radar_work();
drawLine();
}
//TEXT CODE:
void drawText()
{
fill(98, 245, 60);
textSize(25);
if (distance>0)
{
text("Distance of object : "+distance+"cm", -670, -720);
} else
{
text("Distance: no object", -670, -720);
}
textSize(13);
text("10cm", -17, -55);
text("20cm", -17, -105);
text("30cm", -17, -155);
text("40cm", -17, -205);
text("50cm", -17, -255);
text("60cm", -17, -305);
text("70cm", -17, -355);
text("80cm", -17, -405);
text("90cm", -17, -455);
text("100cm", -17, -505);
text("110cm", -17, -555);
text("120cm", -17, -605);
text("130cm", -17, -655);
text("140cm", -20, -705);
textSize(25);
fill(98, 245, 60);
translate(648*cos(radians(10)), -675*sin(radians(10)));
rotate(-radians(10));
text("10°", 0, 0);
resetMatrix();
translate(1425*cos(radians(20)), 2230*sin(radians(20)));
rotate(-radians(0));
text("0°", 0, 0);
resetMatrix();
translate(1382*cos(radians(20)), 1574*sin(radians(20)));
rotate(-radians(20));
text("20°", 0, 0);
resetMatrix();
translate(1446*cos(radians(30)), 875*sin(radians(30)));
rotate(-radians(30));
text("30°", 0, 0);
resetMatrix();
translate(1373*cos(radians(30)), 690*sin(radians(30)));
rotate(-radians(40));
text("40°", 0, 0);
resetMatrix();
translate(1280*cos(radians(30)), 525*sin(radians(30)));
rotate(-radians(50));
text("50°", 0, 0);
resetMatrix();
translate(1175*cos(radians(30)), 400*sin(radians(30)));
rotate(-radians(60));
text("60°", 0, 0);
resetMatrix();
translate(1050*cos(radians(30)), 300*sin(radians(30)));
rotate(-radians(70));
text("70°", 0, 0);
resetMatrix();
translate(925*cos(radians(30)), 250*sin(radians(30)));
rotate(-radians(80));
text("80°", 0, 0);
resetMatrix();
translate(780*cos(radians(30)), 190*sin(radians(30)));
rotate(-radians(0));
text("90°", 0, 0);
resetMatrix();
translate(665*cos(radians(30)), 255*sin(radians(30)));
rotate(-radians(100));
text("100°", 0, 0);
resetMatrix();
translate(540*cos(radians(30)), 315*sin(radians(30)));
rotate(-radians(110));
text("110°", 0, 0);
resetMatrix();
translate(420*cos(radians(30)), 410*sin(radians(30)));
rotate(-radians(120));
text("120°", 0, 0);
resetMatrix();
translate(310*cos(radians(30)), 545*sin(radians(30)));
rotate(-radians(130));
text("130°", 0, 0);
resetMatrix();
translate(220*cos(radians(30)), 700*sin(radians(30)));
rotate(-radians(140));
text("140°", 0, 0);
resetMatrix();
translate(146*cos(radians(30)), 885*sin(radians(30)));
rotate(-radians(150));
text("150°", 0, 0);
resetMatrix();
translate(80*cos(radians(20)), 1590*sin(radians(20)));
rotate(-radians(160));
text("160°", 0, 0);
resetMatrix();
translate(-1*cos(radians(20)), 2230*sin(radians(20)));
rotate(-radians(0));
text("180°", 0, 0);
resetMatrix();
translate(60*cos(radians(30)), 1310*sin(radians(30)));
rotate(-radians(170));
text("170°", 0, 0);
}
DRAW CODE:
void drawRadar() {
translate(690, 765);
noFill();
strokeWeight(1.5);
stroke(98, 245, 31);
arc(0, 0, 1400, 1400, PI, TWO_PI);
arc(0, 0, 1300, 1300, PI, TWO_PI);
arc(0, 0, 1200, 1200, PI, TWO_PI);
arc(0, 0, 1100, 1100, PI, TWO_PI);
arc(0, 0, 1000, 1000, PI, TWO_PI);
arc(0, 0, 900, 900, PI, TWO_PI);
arc(0, 0, 800, 800, PI, TWO_PI);
arc(0, 0, 700, 700, PI, TWO_PI);
arc(0, 0, 600, 600, PI, TWO_PI);
arc(0, 0, 500, 500, PI, TWO_PI);
arc(0, 0, 400, 400, PI, TWO_PI);
arc(0, 0, 300, 300, PI, TWO_PI);
arc(0, 0, 200, 200, PI, TWO_PI);
arc(0, 0, 100, 100, PI, TWO_PI);
stroke(98, 245, 31);
noFill();
line(760, 0, 760, 0);
line(0, 0, -700*cos(radians(10)), -700*sin(radians(10)));
line(0, 0, -700*cos(radians(20)), -700*sin(radians(20)));
line(0, 0, -700*cos(radians(30)), -700*sin(radians(30)));
line(0, 0, -700*cos(radians(40)), -700*sin(radians(40)));
line(0, 0, -700*cos(radians(50)), -700*sin(radians(50)));
line(0, 0, -700*cos(radians(60)), -700*sin(radians(60)));
line(0, 0, -700*cos(radians(70)), -700*sin(radians(70)));
line(0, 0, -700*cos(radians(80)), -700*sin(radians(80)));
line(0, 0, -700*cos(radians(90)), -700*sin(radians(90)));
line(0, 0, -700*cos(radians(100)), -700*sin(radians(100)));
line(0, 0, -700*cos(radians(110)), -700*sin(radians(110)));
line(0, 0, -700*cos(radians(120)), -700*sin(radians(120)));
line(0, 0, -700*cos(radians(130)), -700*sin(radians(130)));
line(0, 0, -700*cos(radians(140)), -700*sin(radians(140)));
line(0, 0, -700*cos(radians(150)), -700*sin(radians(150)));
line(0, 0, -700*cos(radians(160)), -700*sin(radians(160)));
line(0, 0, -700*cos(radians(170)), -700*sin(radians(170)));
line(-860*cos(radians(30)), 0, 700, 0);
}
//WORKING CODE:
void radar_work()
{
angle+=derection;
if (angle==180)
{
derection=-1;
}
if (angle==0)
{
derection=1;
}
}
//SCAN CODE:
void drawLine()
{
strokeWeight(11);
stroke(255);
translate(-650, 5);
line(0, 0, -700*cos(radians(-angle-10)), -700*sin(radians(-angle-10)));
int pixelsDistance=0;
strokeWeight(10);
stroke(#0000FF);
pixelsDistance = distance * 5;
if (distance!=0)
{
if (distance<150)
{
line(-pixelsDistance*cos(radians(-angle-10)), -pixelsDistance*sin(radians(-angle-10)), -700*cos(radians(-angle-10)), -700*sin(radians(-angle-10)));
}
}
}
//BY KIANLAGHAEI




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}
Comments